Rockwell Automation MPAR Electric Cylinders User Manual
Page 32
32 MP-Series Electric Cylinders
Rockwell Automation Publication MPAR-IN001D-EN-P - September 2012
Configure the Kinetix 300 Drive for Electric Cylinders
These steps assume that an electric cylinder and the Kinetix 300 drive are installed and wired as
one axis of a motion system.
For help using the Kinetix 300 drive as it applies to setting up your electric cylinder, refer to
. This procedure assumes that you are familiar with the Kinetix
300 drive.
1.
Run MotionView Onboard software.
2.
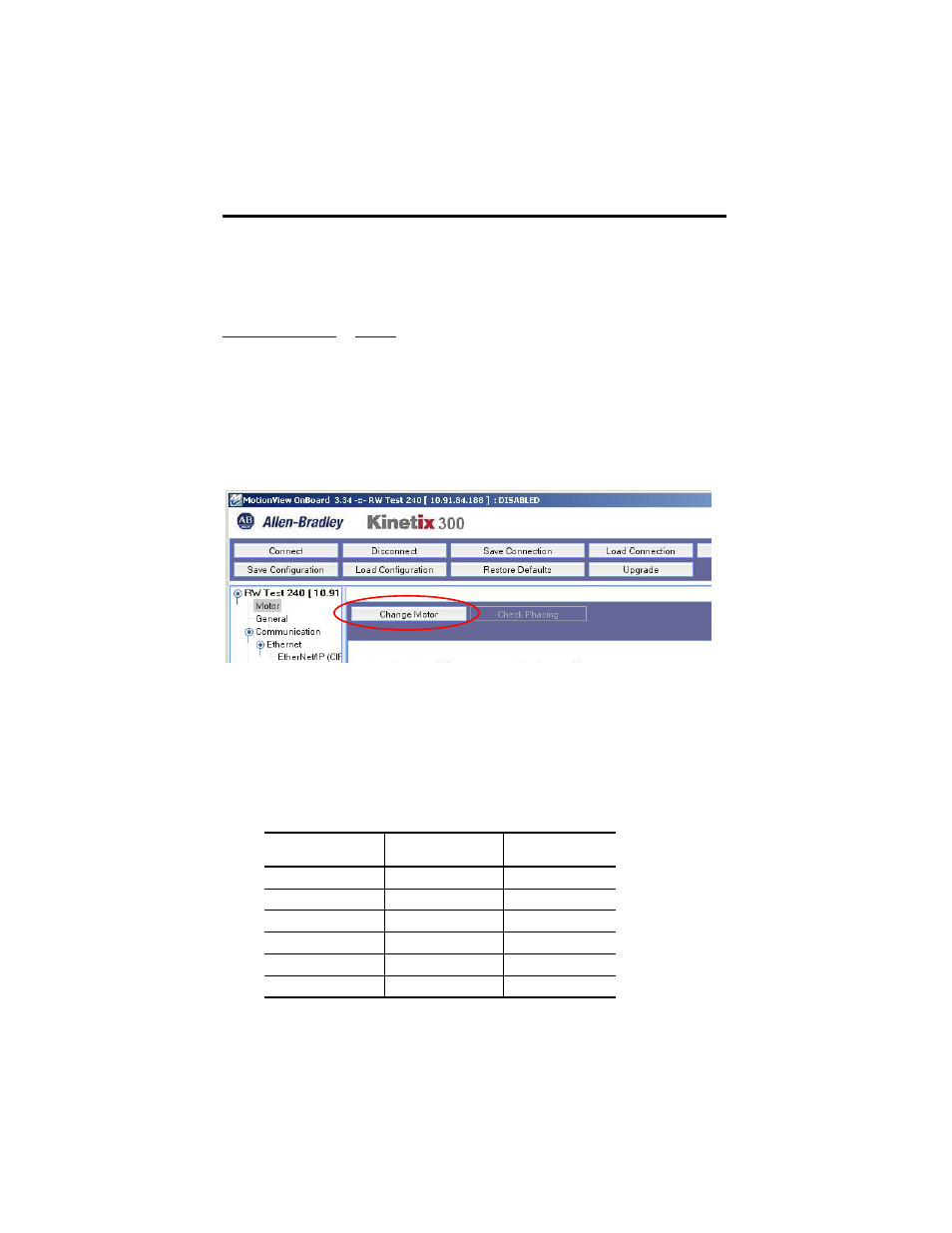
From the Drive Organizer, click Motor.
3.
Verify that your electric cylinder model is displayed in the Motor Model field.
4.
Click Change Motor.
The motor model will automatically update to the correct model number.
5.
Click Yes twice.
6.
Verify the motor model matches the electric cylinder model connected to the drive
7.
Click OK.
8.
From the Drive Organizer, click General.
9.
Using values from the following table, enter Accel Limit, Decel Limit, and User Units.
User Units can be entered in rev/mm or rev/in. Your choice determines the unit of
measure for the axis.
10.
From the Drive Organizer, click Homing.
Cat. No.
Accel/Decel Limits
rpm/s
User Units
rev/mm (rev/in.)
MPAR-x1xxxB-Vxx
120000
0.33333 (8.46667)
MPAR-x1xxxE-Vxx
36000
0.10000 (2.54000)
MPAR-x2xxxC-Vxx
72000
0.20000 (5.08000)
MPAR-x2xxxF-Vxx
28346
0.07874 (2.00000)
MPAR-x3xxxE-Mxx
36000
0.10000 (2.54000)
MPAR-x3xxxH-Mxx
18000
0.05000 (1.27000)