Mating cables, Commissioning, Required files – Rockwell Automation MPAR Electric Cylinders User Manual
Page 20
20 MP-Series Electric Cylinders
Rockwell Automation Publication MPAR-IN001D-EN-P - September 2012
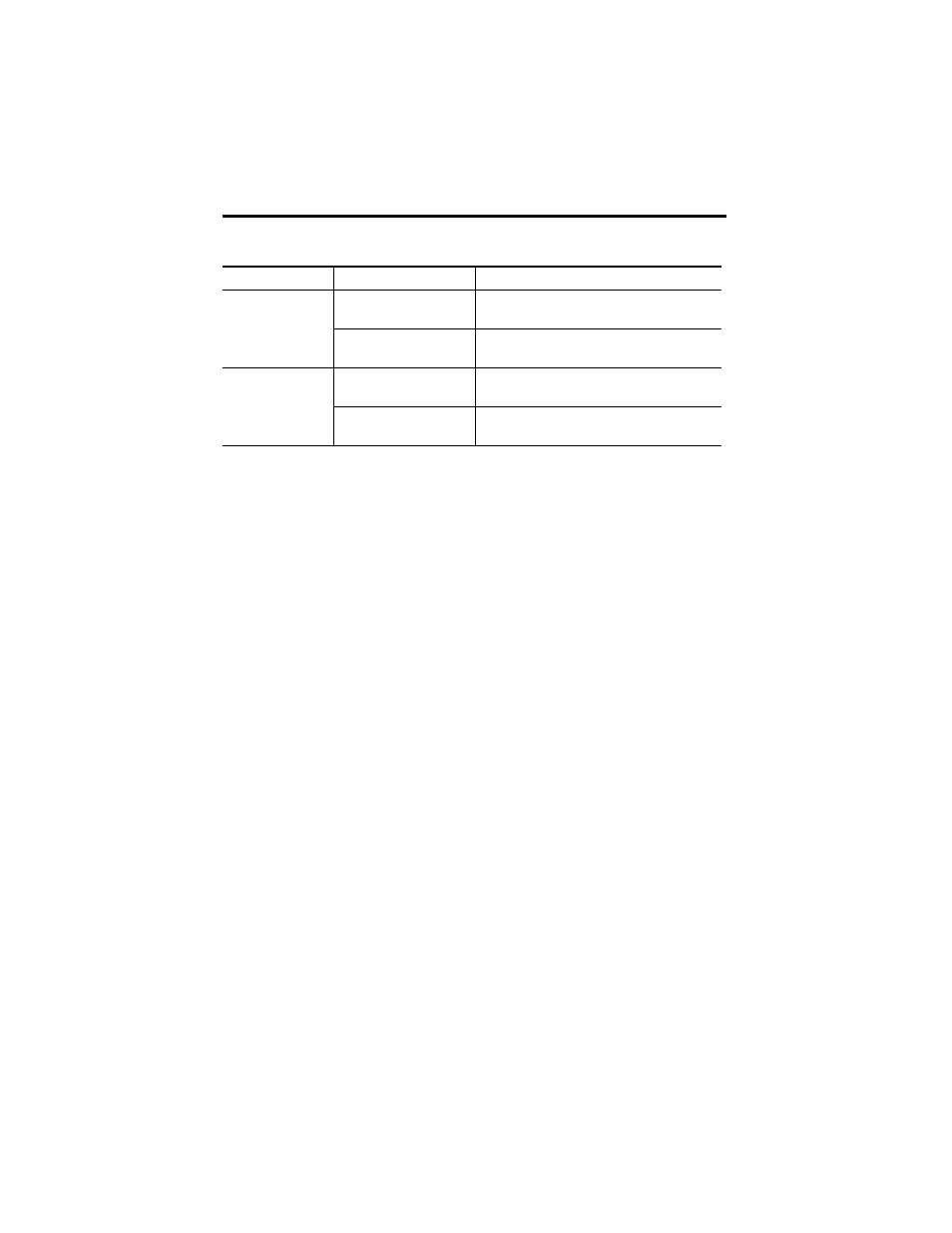
Mating Cables
Commissioning
This section provides guidelines for using RSLogix™ 5000 software to configure your
electric-cylinder servo drive system.
Required Files
Firmware revisions and software versions required to support the electric cylinders include the
following:
•
Kinetix 2000 or Kinetix 6000 multi-axis drives
–
RSLogix 5000 software, version 16.00 or later
–
Firmware revision 1.96 or later
–
For RSLogix 5000 software, version 16.
xx,
use Motion Database file, version 4_23_0 or later
–
For RSLogix 5000 software, version 17.
xx or later,
use Motion Database file, version 5_15_0 or later
•
Kinetix 6200 multi-axis drives
–
Firmware revision 1.30 or later
–
For RSLogix 5000 software, version 17.
xx,
use MPAR_5_19_11.cmf or later
•
Kinetix 6500 multi-axis drives
–
Firmware revision 1.11 or later
–
For RSLogix 5000 software, version 18.
xx,
use MPAR_5_19_11.cmf or later
•
Kinetix 300 single-axis drives
–
For RSLogix 5000 software, version 17.xx or later
Connector
Cable Type
Cable Cat. No.
Feedback
Premolded
2090-CFBM7DD-CEAAxx (standard) or
2090-CFBM7DD-CEAFxx (continuous-flex)
Flying lead
2090-CFBM7DF-CEAAxx (standard) or
2090-CFBM7DF-CEAFxx (continuous-flex)
Power
With brake wires
2090-CPBM7DF-xxAAxx (standard) or
2090-CPBM7DF-xxAFxx (continuous-flex)
Without brake wires
2090-CPWM7DF-xxAAxx (standard) or
2090-CPWM7DF-xxAFxx (continuous-flex)