Analog signals – MTS SWIFT 30 Sensor User Manual
Page 32
SWIFT 30 Sensors
32
Transducer Interface
Hardware Overview
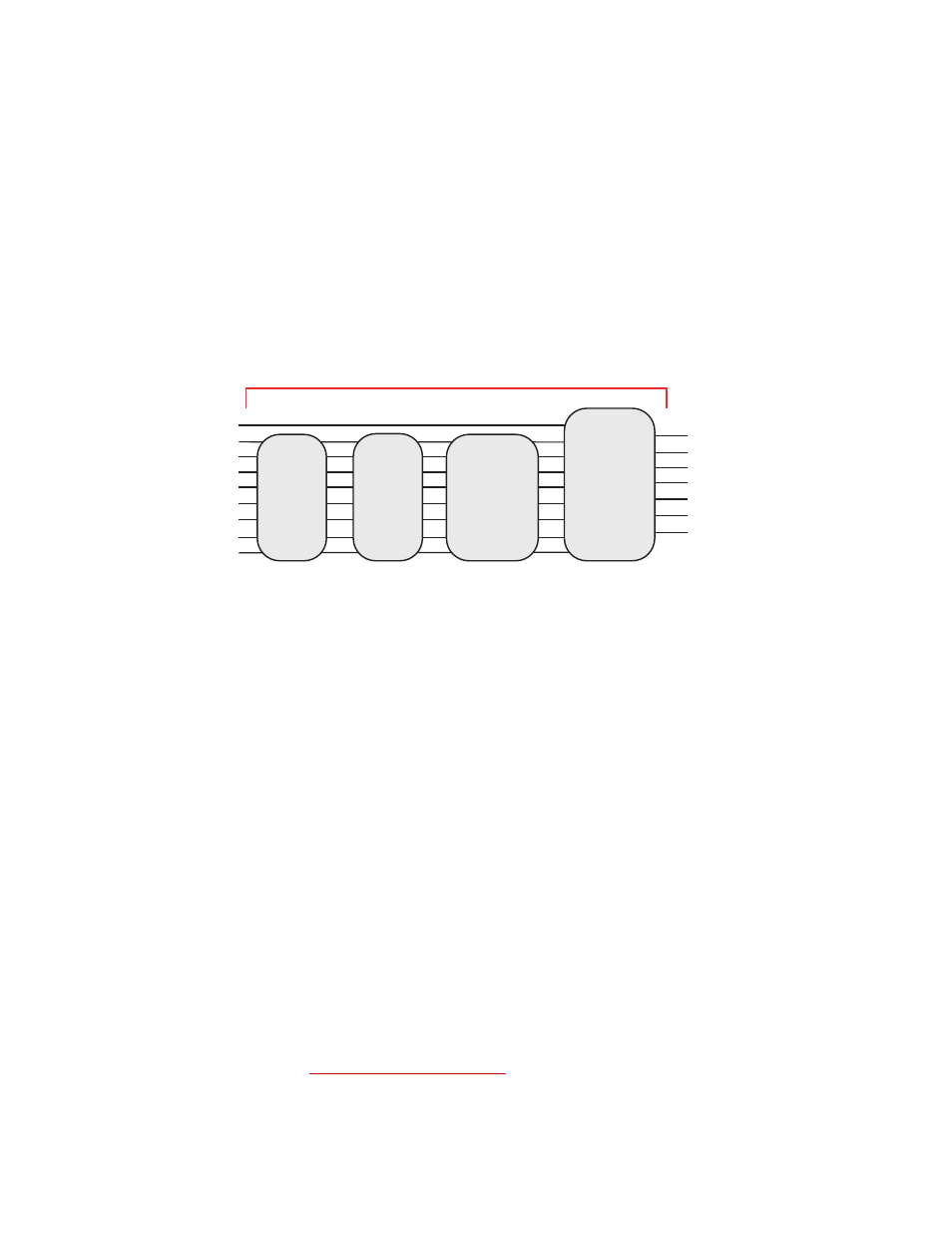
The TI transforms eight inputs (amplified bridge signals) into three forces and
three moments by the following process:
•
Applying a zero offset and scaling the signals
•
Using a geometric matrix to transform the signals into three forces and three
moments in the transducer reference frame
•
Using a cross-coupling matrix calculation to scale and sum the individual
signals into each output
•
In spinning applications, using a rotational transformation to put the forces
and moments into a stationary reference frame
The TI conditions the transducer signals, producing seven analog output signals
proportional to the following values:
•
Longitudinal force (Fx)
•
Lateral force (Fy)
•
Vertical force (Fz)
•
Overturning moment (Mx)
•
Driving/Braking moment (My)
•
Steering moment (Mz)
•
Angle output (
θ)
Analog signals
The force and moment signals are output from the TI in the form of ±10 V
1
full
scale analog signals. These signals can be used by any data acquisition system.
The angle output is an analog voltage that is proportional to angular position. At
0° the output is 0 V. At 360°, the output is 5 V.
Fx1
Fx2
Fy1
Fy2
Fy3
Fy4
Fz1
Fz2
Fx
Fy
Fz
Mx
My
Mz
Geometric
Matrix
Zero and
Scaling
q
Cross
Coupling
Matrix
Rotational
Transformation
q
Inputs
Outputs
Transducer Interface Functions
S20-09
1.
Standard from MTS. Other full-scale output voltages can be evaluated and may be
provided at special request.