Programming – Lenze E94P PositionServo with MVOB User Manual
Page 80
78
L
PM94H201B_13xxxxxx_EN
Programming
2.15.9.20
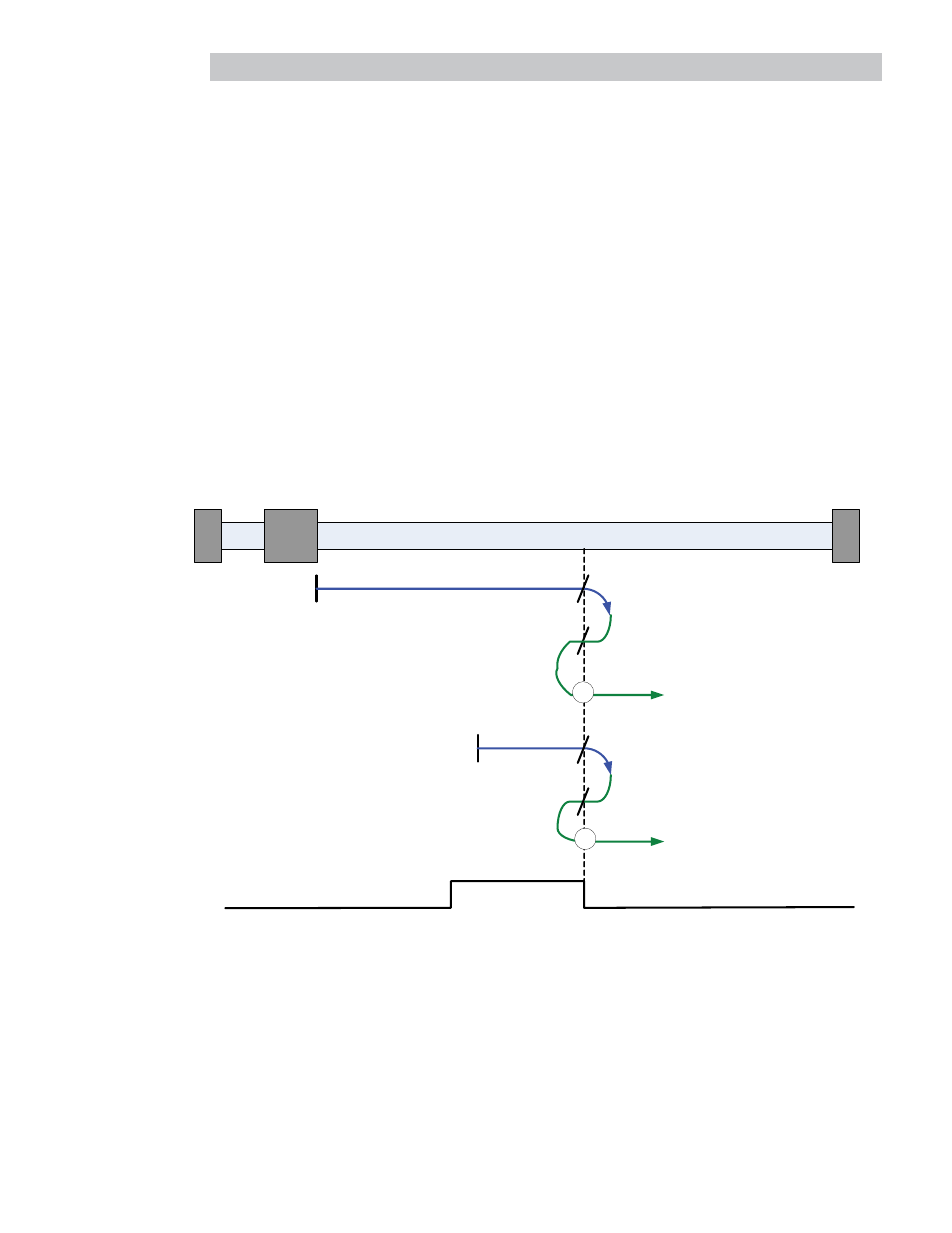
Homing Method 25: Homing to Homing Switch (without index pulse)
Using this method the initial direction of movement is positive. The home position is the negative edge of the homing
switch.
Axis will accelerate to
fast homing velocity in the positive direction and continue until Homing Switch (selectable via
Var_Home_Switch_Input Variable) is deactivated (falling edge) shown at position A. Axis then decelerates to zero
velocity.
If the homing switch is already active when the homing routine commences then this does not effect this mode of
homing as the procedure is searching for falling edge of homing switch in both cases.
Axis will then accelerate to
slow homing velocity in the negative direction. Motion will continue until the rising edge of
the homing switch is detected (position B), where the axis will decelerate to 0 velocity.
Axis will then accelerate to
slow homing velocity in the positive direction. Motion will continue until the falling edge of
the homing switch is detected (position 25). This is the home position (excluding offset).
NOTE: if the axis is on the wrong side of the homing switch when homing is started then the axis will move positive until
it contacts the positive limit switch (A2). Upon activating the positive limit switch the axis will change direction (negative)
continuing motion until it sees the rising edge of the homing switch. The axis will then stop and follow the procedure as
detailed above.
A
B
25
25
A
B
Homing Switch
(Var_Home_Switch_Input)
Figure 44: Homing Method 25