Reference, 3 quick start examples, 1 quick start - external torque/velocity – Lenze E94P PositionServo with MVOB User Manual
Page 124
122
L
PM94H201B_13xxxxxx_EN
Reference
3.3
Quick Start Examples
Contained in the following four sections are the connections and parameter settings to quickly setup a PositionServo
drive for External Torque/Velocity, External Positioning, Internal Torque/Velocity and Internal Positioning modes. These
Quick Start reference tables are NOT a substitute for reading the PositionServo User Manual. Observe all safety notices
in the PositionServo User and Programming Manuals.
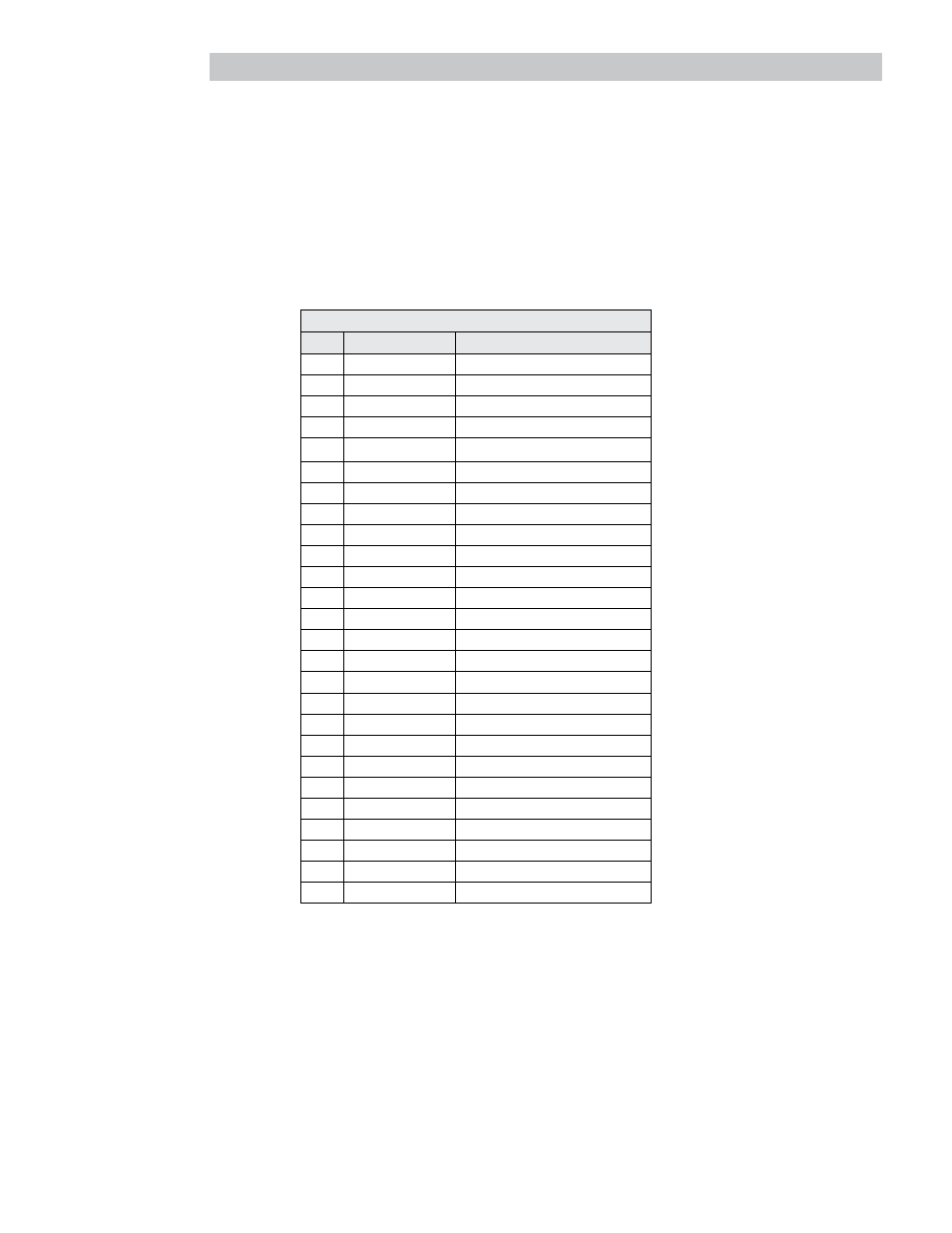
3.3.1 Quick Start - External Torque/Velocity
Table 64: Connections for External Torque/Velocity Mode
I/O (P3)
Pin
Name
Function
5
GND
Drive Logic Common
6
+5V
+5V Output (max 100mA)
7
BA+
Buffered Encoder Output: Channel A+
8
BA-
Buffered Encoder Output: Channel A-
9
BB+
Buffered Encoder Output: Channel B+
10
BB-
Buffered Encoder Output: Channel B-
11
BZ+
Buffered Encoder Output: Channel Z+
12
BZ-
Buffered Encoder Output: Channel Z-
22
ACOM
Analog common
23
AO1
Analog output
24
AIN1+
Positive (+) of Analog signal input
25
AIN1 -
Negative (-) of Analog signal input
26
IN_A_COM
Digital input group A COM terminal
27
IN_A1
Digital input A1
28
IN_A2
Digital input A2
29
IN_A3
Digital input A3
41
RDY+
Ready output Collector
42
RDY-
Ready output Emitter
43
OUT1-C
Programmable output #1 Collector
44
OUT1-E
Programmable output #1 Emitter
45
OUT2-C
Programmable output #2 Collector
46
OUT2-E
Programmable output #2 Emitter
47
OUT3-C
Programmable output #3 Collector
48
OUT3-E
Programmable output #3 Emitter
49
OUT4-C
Programmable output #4 Collector
50
OUT4-E
Programmable output #4 Emitter
Note 1: Connections
highlighted in BLUE
are mandatory/necessary for operation in this mode.