Introduction – Lenze E94P PositionServo with MVOB User Manual
Page 8
6
L
PM94H201B_13xxxxxx_EN
Introduction
1.3
MotionView / MotionView Studio
There are two versions of MotionView Software. The current version of MotionView resides inside the drive’s memory
and is referred to as “MotionView on Board” or MVOB. Previous versions were supplied as a PC-installed software
package and were referred to simply as MotionView. This manual refers only to the MotionView OnBoard software.
MVOB drives are identified by the model number ending in either an ‘S’ or an ‘M’.
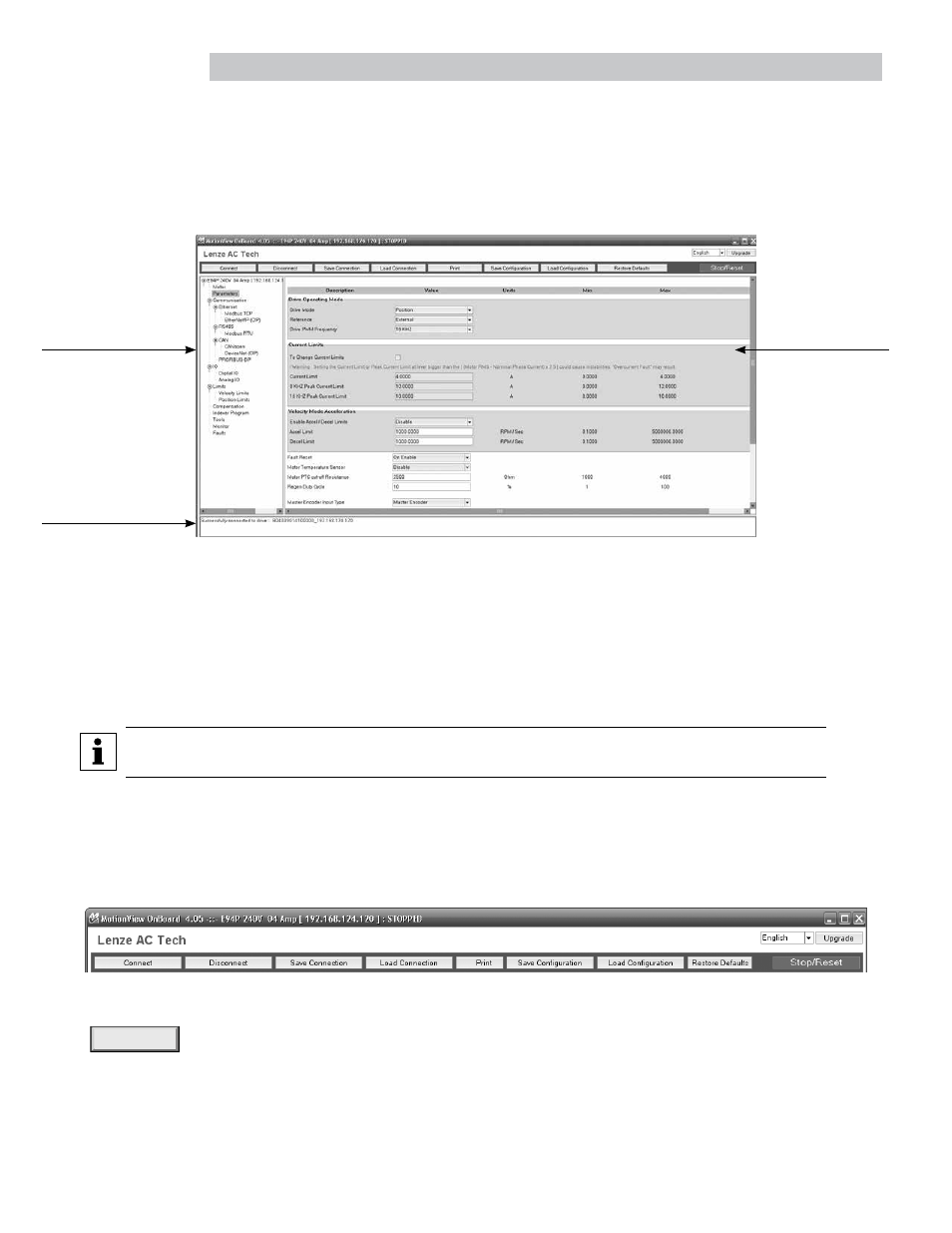
Figure 2: MotionView OnBoard Parameters Display
MotionView is the universal programming software used to communicate with and configure the PositionServo drive. The
MotionView platform is segmented into three windows. The first window is the
“Parameter Tree Window”. This window
is used much like Windows Explorer. The various parameter groups for the drive are represented here as folders or files.
Once the desired parameter group file is selected, all of the corresponding parameters within that parameter group will
appear in the second window, the
“Parameter View Window”. The user can then enable, disable or edit drive features
or parameters from the “Parameter View Window”. The third window is the
“Message Window”. This window is located
at the bottom of the screen and will display communication status and errors.
NOTE
To run MotionView OnBoard (MVOB) on a Mac OS, run the PC emulation tool first.
1.3.1 Main Toolbar
The most commonly used functions of MotionView are accessible via the Main Toolbar as illustrated in Figure 3. If a
function icon is greyed out that denotes the function is presently unavailable. A function may be unavailable because a
drive is not physically connected to the network or the present set-up and operation of the drive prohibits access to that
function. Use the pull-down menu in the top right-hand corner to select the language. [English] is the default language.
Figure 3: Main Toolbar
Connect
Build a connection list of the drive(s) to communicate with on the network. Build the connection
list by using any one of these three methods:
Parameter (Node)
Tree Window
Message Window
Parameter View
Window