Introduction, 3 segment moves, Distance (user units) velocity (rps) – Lenze E94P PositionServo with MVOB User Manual
Page 29
PM94H201B_13xxxxxx_EN
L
27
Introduction
Velocity
Time
Triangular Move Profile
Steady State Velocity
(Defined by 'DECEL' variable)
Acceleration Rate
(Defined by 'ACCEL' variable)
Trapezoidal Move Profile
Deceleration Rate
(Defined by 'DECEL' variable)
Acceleration & Deceleration Rates Only
(Defined by 'ACCEL' and 'DECEL' variables)
Figure 10: Trapezoidal Move
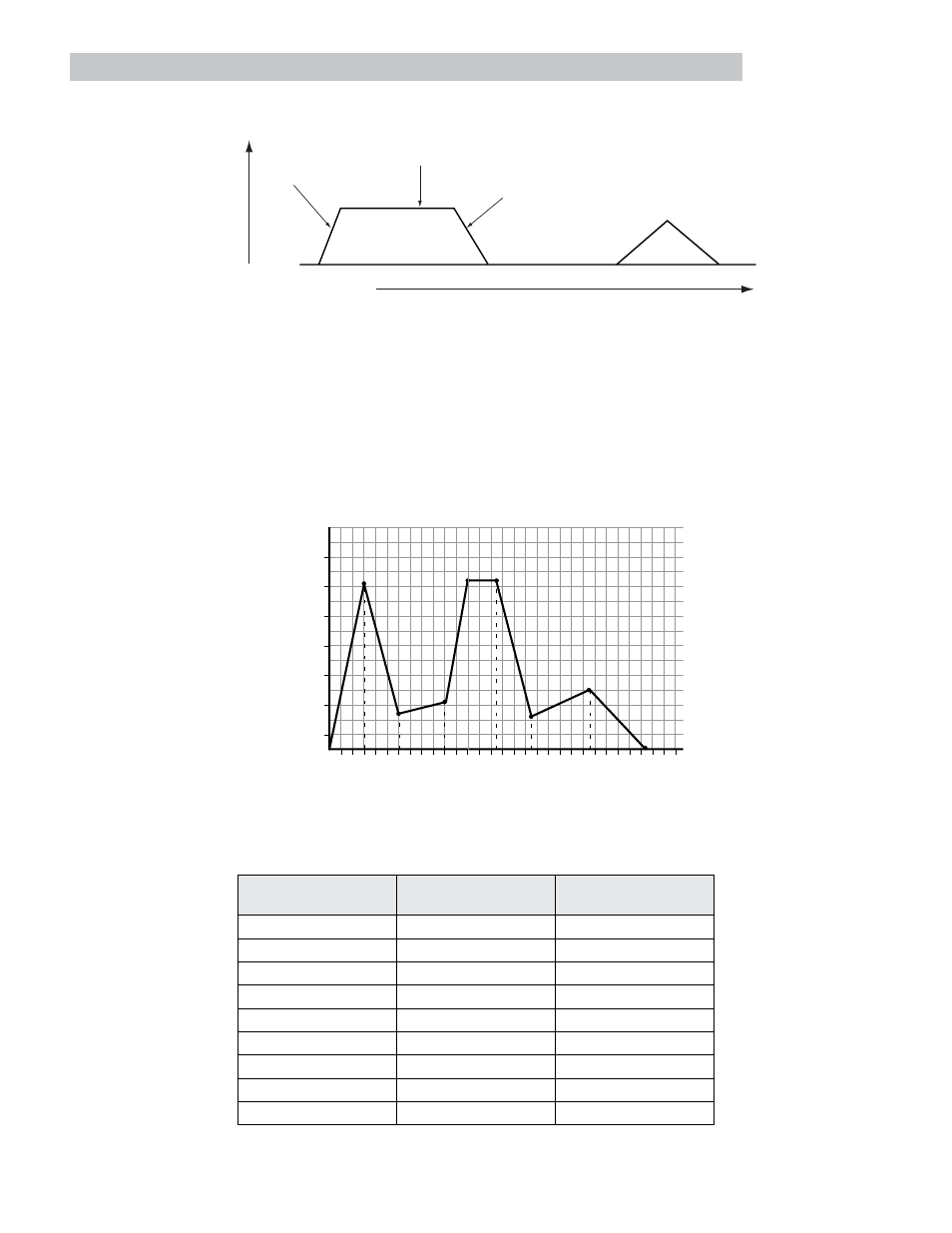
1.10.3 Segment Moves
MOVED and MOVEP commands facilitate simple motion to be commanded, but if the required move profile is more
complex than a simple trapezoidal will allow, then the segment MDV move can be used.
The profile shown in Figure 11 is divided into 8 segments or 8 MDV moves. An MDV move (Move Distance Velocity) has
two arguments. The first argument is the distance moved in that segment. This distance is referenced from the motor’s
current position in User Units. The second argument is the desired target velocity for the end of the segment move. That
is the velocity at which the motor will run at the moment when the specified distance in this segment is completed.
70
60
50
40
30
20
10
5
10
15
20
25
30
Segment
1
Segment
2
Segment
4
Segment
3
Segment
8
Segment
6
Segment
5
Segment
7
Distance (User Units)
Velocity (RPS)
Figure 11: Segment Move
Table 6: Segment Move
Segment Number
Distance moved
during segment
Velocity at the end of
segment
1
3
56
2
3
12
3
4
16
4
2
57
5
2.5
57
6
3
11
7
5
20
8
5
0
-
-
-