Reference – Lenze E94P PositionServo with MVOB User Manual
Page 118
116
L
PM94H201B_13xxxxxx_EN
Reference
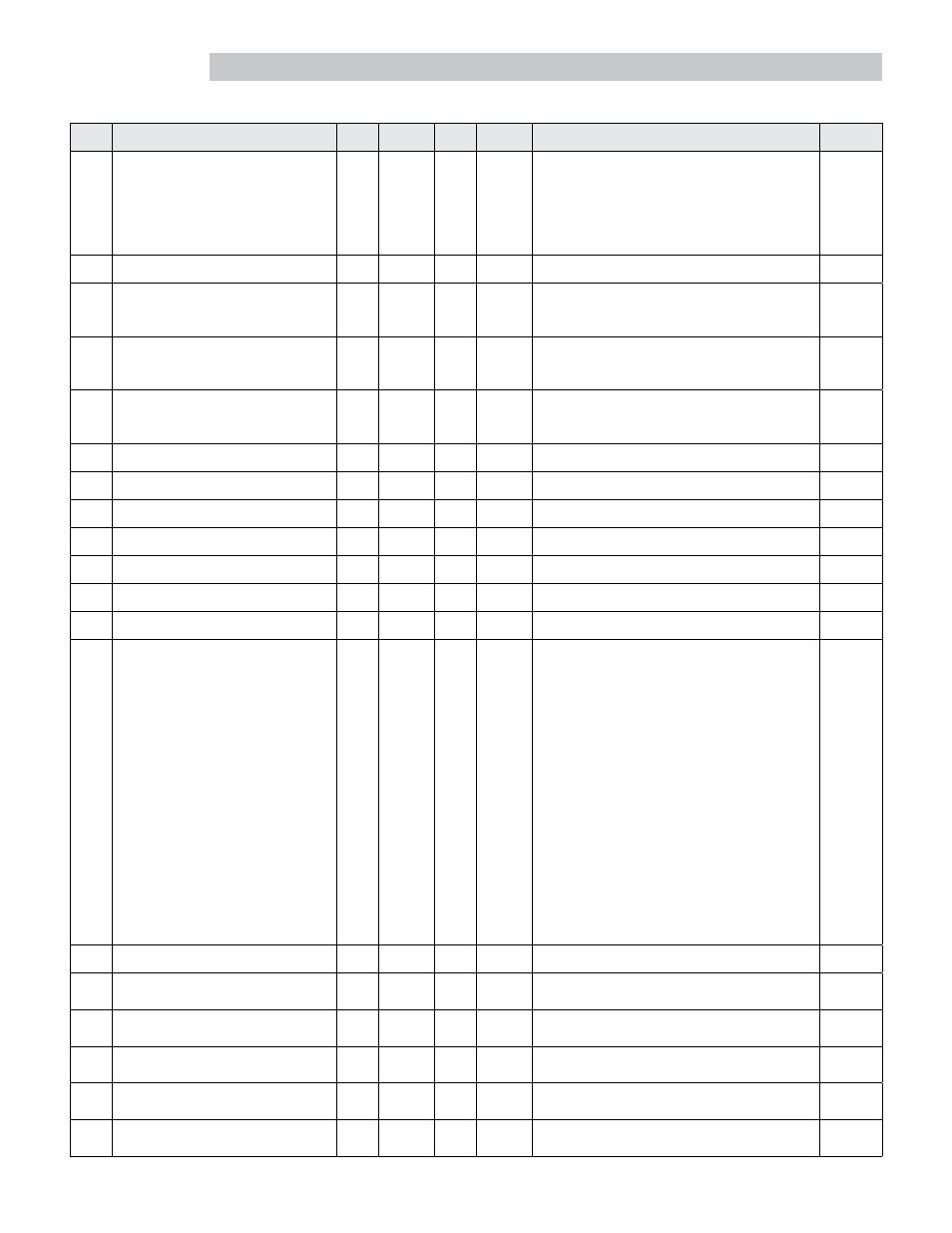
Index Name
Type Format EPM Access Description
Units
247
VAR_M_VALIDATE_MOTOR
W
N
W
Initiate / accept drive motor parameters
entered in motor data PIDs.
Motor parameters are variables whose
identifier starts with VAR_M_xxxxxx
0 - No Action
1 - Validate Motor Data
248
VAR_M_I2T
F
Y
R/W Not used
249
VAR_M_EABSOLUTE
F
Y
R/W
Indicates type of ABS encoder for models
with ABS encoder support. Otherwise
currently not active.
250
VAR_M_ABSWAP
F
Y
R/W
Motor Encoder Feedback: B leads A
0 - No Action
1 - B leads A for forward checked (active)
251
VAR_M_HALLS_INVERTED
F
Y
R/W
Motor Encoder Feedback: Halls
0 - No Action
1 - Inverted Halls Box checked (active)
252
RESERVED
Do NOT use
253
RESERVED
Do NOT use
254
RESERVED
Do NOT use
255
RESERVED
Do NOT use
256
RESERVED
Do NOT use
257
RESERVED
Do NOT use
258
RESERVED
Do NOT use
259
RESOLVER_EMU_TRK
W
Y
R/W
Resolver Emulation Track Number
Range: 0 - 15
0 - 1024
1 - 256
2 - 360
3 - 400
4 - 500
5 - 512
6 - 720
7 - 800
8 - 1000
9 - 1024
10 - 2000
11 - 2048
12 - 2500
13 - 2880
14 - 250
15 - 4096
260
RESERVED
261
VAR_CIP_LINK_A_IN_CTRL
W
Y
R/W
Datalink “A” for input assembly
(Refer to Ethernet/IP manual for details)
262
VAR_CIP_LINK_B_IN_CTRL
W
Y
R/W
Datalink “B” for input assembly
(Refer to Ethernet/IP manual for details)
263
VAR_CIP_LINK_C_IN_CTRL
W
Y
R/W
Datalink “C” for input assembly
(Refer to Ethernet/IP manual for details)
264
VAR_CIP_LINK_D_IN_CTRL
W
Y
R/W
Datalink “D” for input assembly
(Refer to Ethernet/IP manual for details)
265
VAR_CIP_LINK_A_OUT_CTRL
W
Y
R/W
Datalink “A” for output assembly
(Refer to Ethernet/IP manual for details)