Programming, 13 fault codes (dfaults register) – Lenze E94P PositionServo with MVOB User Manual
Page 58
56
L
PM94H201B_13xxxxxx_EN
Programming
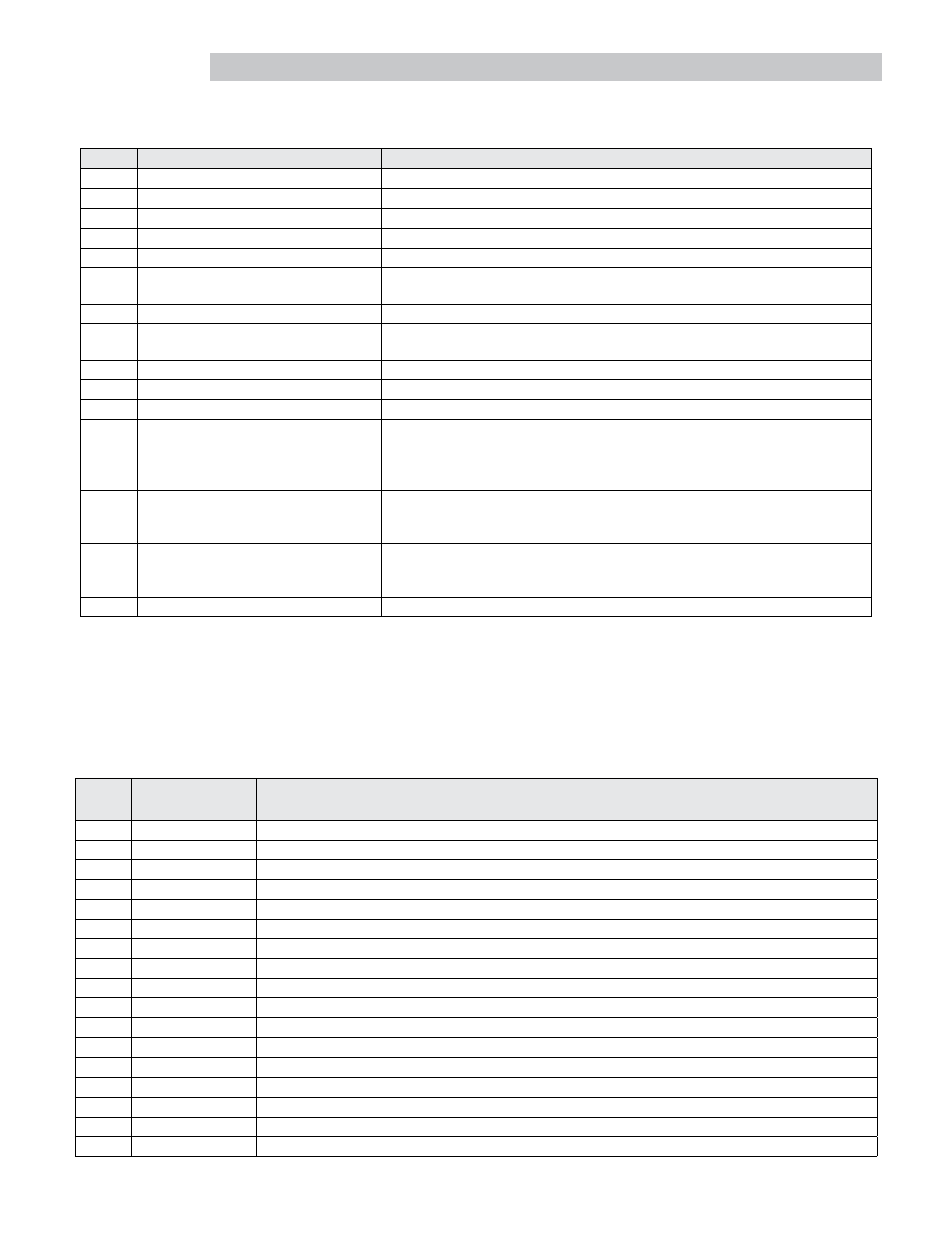
Table 17: Extended Status Bits (Variable #83 EXSTATUS)
Bit #
Function
Comment
0
Reserved
1
Velocity in specified window
Velocity in limits as per parameter #59: VAR_VLIMIT_SPEEDWND
2-4
Reserved
5
Velocity at 0 (zero)
Velocity 0: Zero defined by parameter #58: VAR_VLIMIT_ZEROSPEED
6,7
Reserved
8
Bus voltage below under-voltage limit
Utilized to indicate drive is operating from +24V keep alive and a valid DC
bus voltage level is not present.
9,10
Reserved
11
Regen circuit is on
Drive regeneration circuit is active. Drive will be dissipating power through
the braking resistor (if fitted).
12-20
Reserved
21
Set if homing operation in progress
Drive executing Pre-defined homing function (see section 2.15).
22
Set if system homed
Drive completed Pre-defined homing function (see section 2.15).
23
If set then last fault will remain on the
display until re-enabled.
User can set this bit to retain fault code on the display until re-enabled. It is
useful if there is a fault handler routine. When the fault handler is exited, the
fault number on the display will be replaced by current status (usually DiS if
bit #23 is not set). Setting bit #23 retains diagnostics on the display.
24
Set if EIP IO exclusive owner
connection is established. Cleared if
closed.
Checks if drive is controlled by EthernetIP master. Use bit #24 and bit #25 to
process “loss of connection” condition (if needed ) in the user’s program
25
Set if EIP IO exclusive owner
connection times out. Cleared if exc.
owner conn exsists.
Checks if connection with Ethernet/IP master is lost. Use bit #24 and bit #25
to process “loss of connection” condition (if needed) in the user’s program
26-31
Reserved
2.13 Fault Codes (DFAULTS register)
Whenever a fault occurs in the drive, a record of that fault is recorded in the Fault Register (DFAULTS). In addition,
specific flags in the System Status Register will be set helping to indicate what class of fault the current fault belongs to.
Table 18 summarizes the fault codes. Codes from 1 to 16 are used for DSP subsystem errors. Codes above that range
are generated by various subsystems of the PositionServo.
Table 18: DFAULTS Register
Fault
ID
Associated flags
in status register
Description
1
1, 3
Over voltage
2
1, 3
Invalid Hall sensors code
3
1, 3
Over current
4
1, 3
Over temperature
5
1, 3
The drive is disabled by the ISO 13849-1 Safety Function
6
1, 3
Over speed. (Over speed limit set by motor capability in motor file)
7
1, 3
Position error excess.
8
1, 3
Attempt to enable while motor data array invalid or motor was not selected.
9
1,3
Motor over temperature switch activated
10
1,3
Sub processor error
11-13
-
Reserved
14
1,3
Under voltage (hardware revision 1)
15
1,3
Hardware current trip protection
16
-
Reserved
18
16
Division by zero
19
16
Arithmetic overflow
20
3
Subroutine stack overflow. Exceeded 32 levels subroutines stack depth.