Reference – Lenze E94P PositionServo with MVOB User Manual
Page 106
104
L
PM94H201B_13xxxxxx_EN
Reference
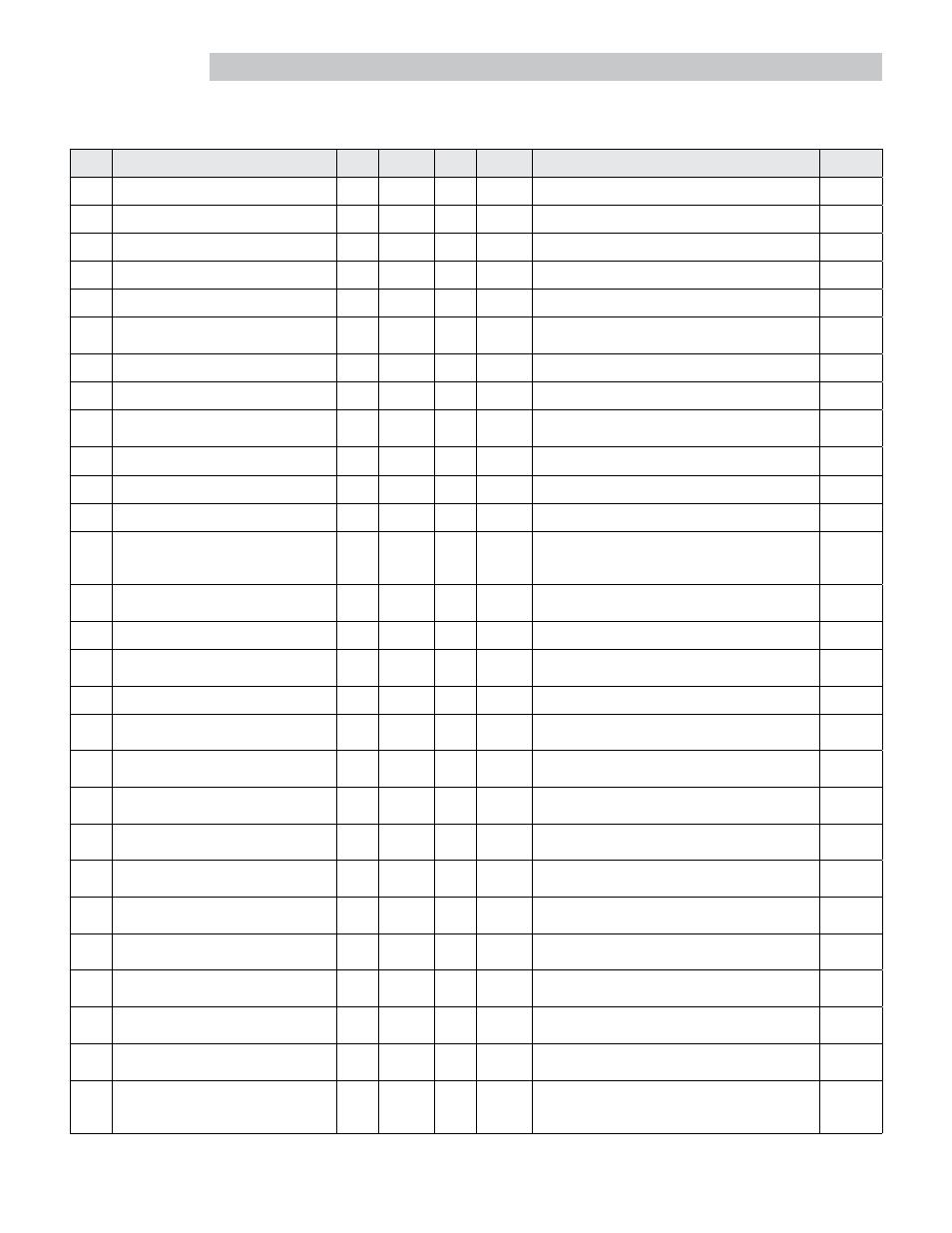
Table 63: PositionServo Variable List
Index Name
Type Format EPM Access Description
Units
1
VAR_IDSTRING
N
R
Drive’s identification string
2
VAR_NAME
Y
R/W Drive’s symbolic name
3
VAR_SERIAL_NUMBER
R
Drive’s serial number
4
VAR_MEM_INDEX
R/W Position pointer in RAM file (0 - 32767)
5
VAR_MEM_VALUE
R/W Value to be read or written to the RAM file
6
VAR_MEM_INDEX_INCREMENT
R/W
Holds value the MEM_INDEX will increment
once the R/W operation is complete
7
VAR_VELOCITY_ACTUAL
F
N
R
Actual measured motor velocity
UU/sec
8
VAR_RSVD_2
9
VAR_DFAULT
Short Name: DFAULTS
R
Drive faults register. Holds current trip / fault
code
10
VAR_M_ID
mtr
Y
R/W* Motor ID
11
VAR_M_MODEL
mtr
Y
R/W* Motor model
12
VAR_M_VENDOR
mtr
Y
R/W* Motor vendor
13
VAR_M_ESET
mtr
Y
R/W*
Motor Feedback Resolver: ‘Positive for CW’
1 - Positive for CW
0 - negative for clockwise
14
VAR_M_HALLCODE
mtr
Y
R/W*
Hallcode index
Range: 0 - 5
15
VAR_M_HOFFSET
mtr
Y
R/W* Reserved
16
VAR_M_ZOFFSET
mtr
Y
R/W*
Resolver Offset
Range: 0 - 360
17
VAR_M_ICTRL
mtr
Y
R/W* Reserved
18
VAR_M_JM
mtr
Y
R/W*
Motor moment of inertia, Jm
Range: 0 - 0.1
Kgm2
19
VAR_M_KE
mtr
Y
R/W*
Motor voltage or back EMF constant, Ke
Range: 1 - 500
V/Krpm
20
VAR_M_KT
mtr
Y
R/W*
Motor torque or force constant, Kt
Range: 0.01 - 10
Nm/A
21
VAR_M_LS
mtr
Y
R/W*
Motor phase-to-phase inductance, Lm
Range: 0.1 - 500
mH
22
VAR_M_RS
mtr
Y
R/W*
Motor phase-to-phase resistance, Rm
Range: 0.01 - 500
[Ohm]
23
VAR_M_MAXCURRENT
mtr
Y
R/W*
Motor’s max current(RMS)
Range: 0.5 - 50
[A]mp
24
VAR_M_MAXVELOCITY
mtr
Y
R/W*
Motor’s max velocity
Range: 500 - 20,000
RPM
25
VAR_M_NPOLES
mtr
Y
R/W*
Motor’s poles number
Rnage: 2 - 200
26
VAR_M_ENCODER
mtr
Y
R/W*
Encoder resolution
Range: 256 - 65536 * 12/Npoles
PPR
27
VAR_M_TERMVOLTAGE
mtr
Y
R/W*
Nominal Motor’s terminal voltage
Range: 50 - 800
[V]olt
28
VAR_M_FEEDBACK
mtr
Y
R/W*
Feedback type
1 - Encoder
2 - Resolver
* These are all R/W variables that only become active after variable 247 is set.