Reference – Lenze E94P PositionServo with MVOB User Manual
Page 125
PM94H201B_13xxxxxx_EN
L
123
Reference
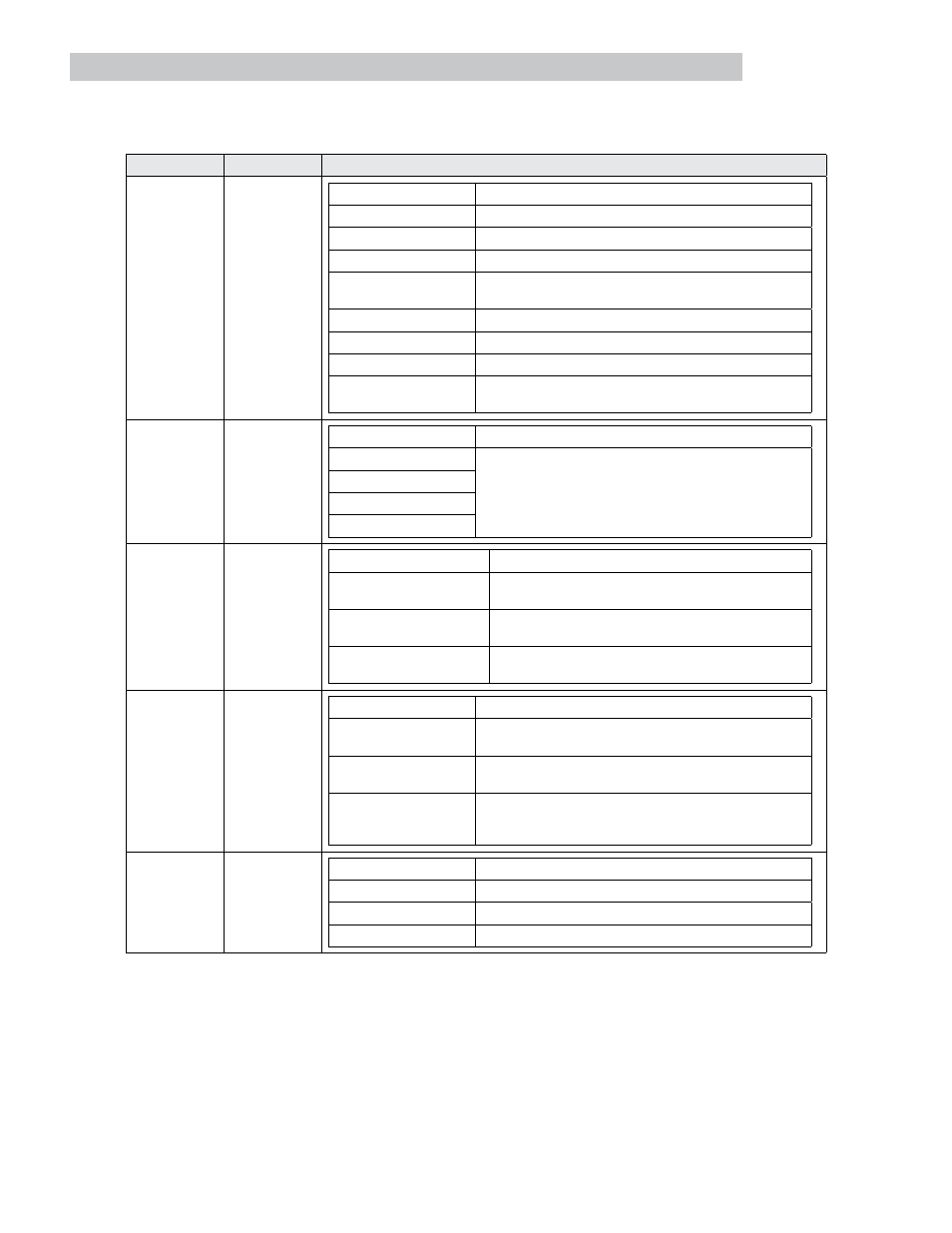
Table 65: Parameter Settings for External Torque/Velocity Mode
MVOB Folder
Sub-Folder
Setting
Parameters
--
Parameter Name
Description
Drive Mode
Set to [Torque] for Torque Mode; [Velocity] for Velocity Mode
Analog Input (Current Scale)
Torque Mode Only: Set to Required Amps per Volt
Analog Input (Velocity Scale)
Velocity Mode Only: Set to Required RPM per Volt
Enable Accel/Decel Limits
Velocity Mode Only: Set to [Enable] to switch on velocity ramp rates;
Set to [Disable] to switch OFF (accelerate at current limit)
Accel Limit
Velocity Mode Only: Set Acceleration Limit in RPM/Sec
Decel Limit
Velocity Mode Only: Set Deceleration Limit in RPM/Sec
Reference
Set to [External] for external Torque/Velocity Mode
Enable Switch Input
Set to [Run] to allow Enable/Disable of the PositionServo to be
controlled via Input A3 (Dedicated Enable)
IO
Digital IO
Parameter Name
Description
Output 1 Function
Output # indicates Digital Output No. 1-4;
Set value to select Output Functionality;
Output Function Values: 1=Not Assigned; 2=Zero Speed;
3=In Speed Window; 4=Current Limit; 5=Run Time Fault; 6=Ready;
7=Brake; 8=In Position
Output 2 Function
Output 3 Function
Output 4 Function
IO
Analog IO
Parameter Name
Description
Analog Input Dead Band
Set Zero Speed Dead Band in mV for Torque/Velocity Reference on
Analog Input 1
Analog Input Offset
Set Torque/Velocity Reference Input Offset on Analog Input 1 to
match Controller Offset
Adjust Analog Input Zero Offset
Tool to automatically learn the Analog Input Offset
(of Analog Input 1)
Limits
Velocity Limits
Parameter Name
Description
Zero Speed
Velocity Mode Only: Set a bandwidth (around ORPM) for activation of
the Zero Speed Output/Flag. Set digital output function to ‘2’.
At Speed
Velocity Mode Only: Set a Target Speed for activation of the At Speed
Output/Flag
Speed Window
Velocity Mode Only: Set a bandwidth (around At Speed parameter)
for activation of the At Speed Output/Flag. Set digital output function
to ‘3’.
Compensation
--
Parameter Name
Description
Velocity P-Gain
Velocity Mode Only: Set P-Gain for Velocity Loop
Velocity I-Gain
Velocity Mode Only: Set I-Gain for Velocity Loop
Gain Scaling
Velocity Mode Only: Apply Scaling Factor to Velocity Gain Set
Note 1: Parameters
highlighted in BLUE
are mandatory/necessary for operation in this mode.