Reference – Lenze E94P PositionServo with MVOB User Manual
Page 107
PM94H201B_13xxxxxx_EN
L
105
Reference
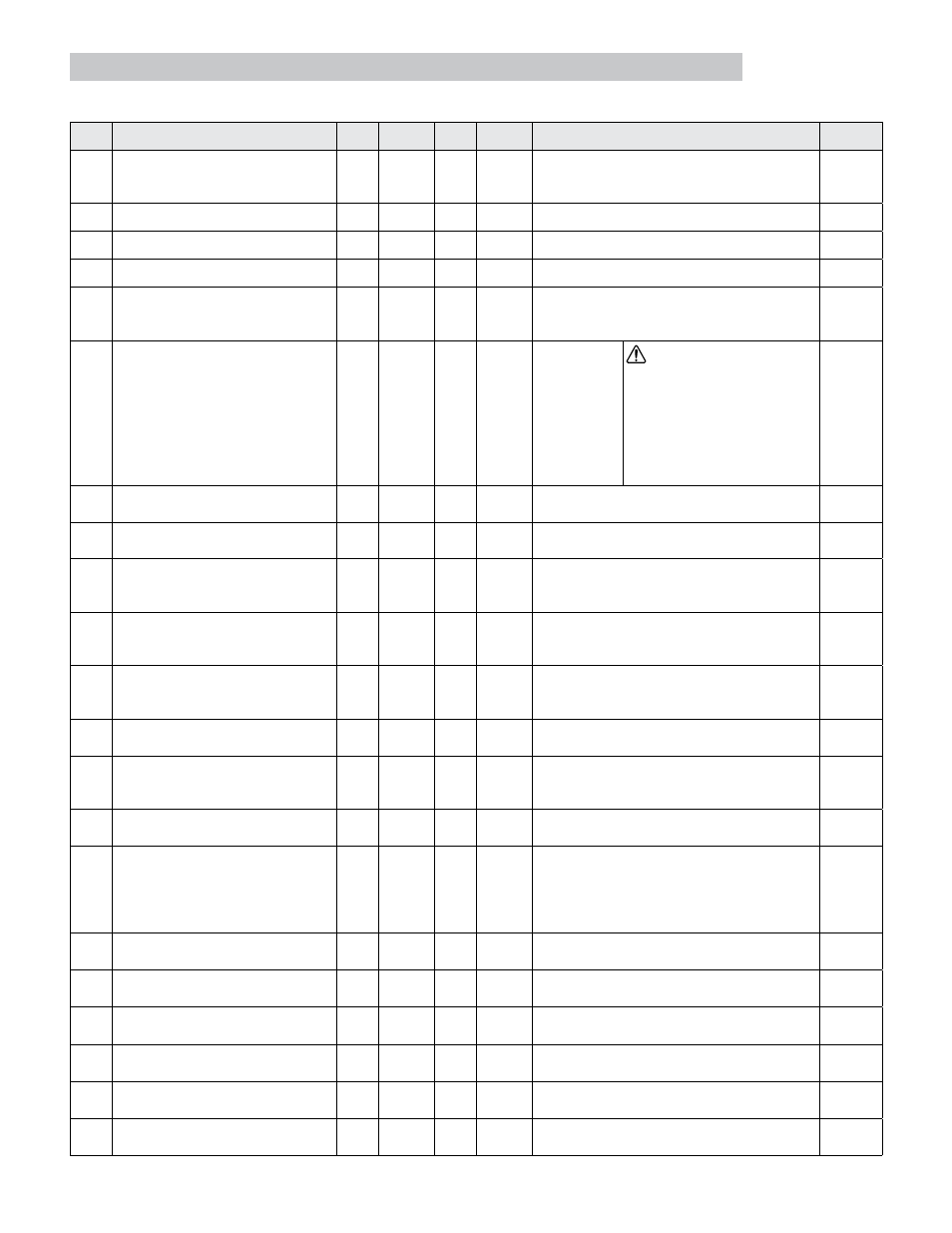
Index Name
Type Format EPM Access Description
Units
29
VAR_ENABLE_SWITCH_TYPE
W
Y
R/W
Enable switch function
0 - inhibit only
1 - Run
Bit
30
VAR_CURRENTLIMIT
F
Y
R/W Current limit
[A]mp
31
VAR_PEAKCURRENTLIMIT16
F
Y
R/W Peak current limit for 16kHz operation
[A]mp
32
VAR_PEAKCURRENTLIMIT
F
Y
R/W Peak current limit for 8kHz operation
[A]mp
33
VAR_PWMFREQUENCY
W
Y
R/W
PWM frequency selection
0 - 16kHz
1 - 8kHz
34
VAR_DRIVEMODE
W
Y
R/W
Drive mode
0 - torque
1 - velocity
2 - position
WARNING! You can
change operating modes
when required during program
execution but do
not change
modes on the fly (with drive
enabled), as this may cause
unexpected behavior of the
motor.
35
VAR_CURRENT_SCALE
F
Y
R/W
Analog input #1 current reference scale
Range: model dependent
A/V
36
VAR_VELOCITY_SCALE
vel
F
Y
R/W
Analog input #1 velocity reference scale
Range: -10,000 to +10,000
RPM/V
37
VAR_REFERENCE
W
Y
R/W
Reference selection:
1 - internal source
0 - external
38
VAR_STEPINPUTTYPE
W
Y
R/W
External Position Mode - Input configuration
0 - Quadrature inputs (A/B)
1 - Step & Direction
39
VAR_MOTORTHERMALPROTECT
W
Y
R/W
Motor thermal protection function:
0 - disabled
1 - enabled
40
VAR_MOTORPTCRESISTANCE
F
Y
R/W
Motor thermal protection PTC cut-off
resistance in Ohms
[Ohm]
41
VAR_SECONDENCODER
W
Y
R/W
Second encoder:
0 - Disabled
1 - Enabled
42
VAR_REGENDUTY
W
Y
R/W
Regen circuit PWM duty cycle in %
Range: 1-100%
%
43
VAR_ENCODERREPEATSRC
W
Y
R/W
Selects source for repeat buffers:
0 - Model 940 - Encoder Port P4
0 - Model 941 - 2nd Encoder Option Bay
1 - Model 940 - 2nd Encoder Option Bay
1 - Model 941 - Resolver Port P4
44
VAR_VP_GAIN
Short Name: VGAIN_P
vel
W
Y
R/W
Velocity loop Proportional gain
Range: 0 - 32767
45
VAR_VI_GAIN
Short Name: VGAIN_I
vel
W
Y
R/W
Velocity loop Integral gain
Range: 0 - 32767
46
VAR_PP_GAIN
Short Name: PGAIN_P
W
Y
R/W
Position loop Proportional gain
Range: 0 - 32767
47
VAR_PI_GAIN
Short Name: PGAIN_I
W
Y
R/W
Position loop Integral gain
Range: 0 - 16383
48
VAR_PD_GAIN
Short Name: PGAIN_D
W
Y
R/W
Position loop Differential gain
Range: 0 - 32767
49
VAR_PI_LIMIT
Short Name: PGAIN_ILIM
W
Y
R/W
Position loop integral gain limit
Range: 0 - 20000