Introduction – Lenze E94P PositionServo with MVOB User Manual
Page 13
PM94H201B_13xxxxxx_EN
L
11
Introduction
Basic Motion Program
Select
[Indexer program] from the Parameter (Node) Tree. The Parameter View window will display the current User Program
stored in the drive. Note that if there is no valid program in the drive’s memory the program editing window will be empty.
WARNING!
This program will cause motion. The motor should be disconnected from the application (free to rotate)
or if a motor is connected, the shaft must be free to spin 10 revs forward and reverse from the location
of the shaft at power up. Also, the machine must be capable of 10 RPS and an accel / decel of 5 RPSS.
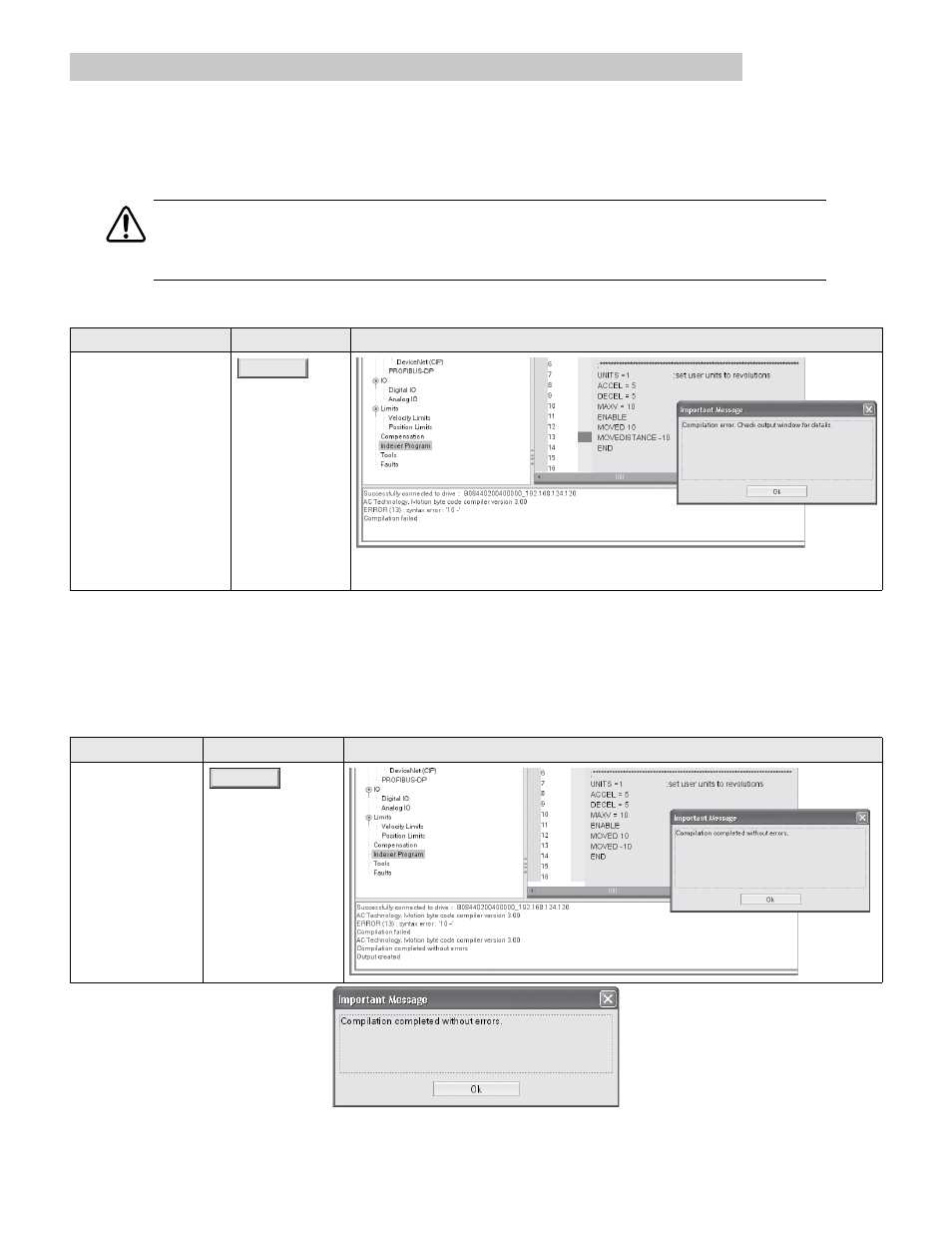
In the program area, clear any existing program (save if required) and replace it with the following program:
Program
Compile
Resultant MotionView OnBoard Messages
UNITS=1
ACCEL = 5
DECEL = 5
MAXV = 10
ENABLE
MOVED 10
MOVEDISTANCE -10
END
Compile
Enter the
program, then
select [Compile]
on the
toolbar. After
compilation
is done, a
“Compilation
Error” message
will appear.
Click [OK] to dismiss the “Compliation error” dialog box. The cause of the compilation error will be displayed in the
Message window, located at the bottom of the MotionView OnBoard screen. MotionView will also highlight the program
line where the error occurred. In the example program above, in the green ‘Program Progression’ column there is a red
box next to the “MOVEDISTANCE -10” statement.
The problem in this example is that “
MOVEDISTANCE” is not a valid command. Change the text “MOVEDISTANCE”
to “
MOVED”.
Program
Compile
Resultant MotionView OnBoard Messages
UNITS=1
ACCEL = 5
DECEL = 5
ENABLE
MOVED 10
MOVED -10
END
Compile
After editing the
program, select
[Compile] on the
program toolbar.
After compilation
is done, the
“Compilation
Complete”
message box
should appear.