Access password, Protection of the access code, Master password – NOVUS Controller N120 User Manual
Page 8: Programs of ramp and soak, Link of programs, Event alarm, Determination of pid parameters
NOVUS AUTOMATION
8/14
ACCESS PASSWORD:
The protected levels, when accessed, request the user to provide the
Access Password for granting permission to change the
configuration of the parameters on these cycles.
The prompt PASS precedes the parameters on the protected levels.
If no password is entered, the parameters of the protected cycles can
only be visualized.
The Access Code is defined by the user in the parameter Password
Change (PAS.(), present in the Calibration level. The factory default
for the password code is 1111.
PROTECTION OF THE ACCESS CODE
The protection system built into the controller blocks for 10 minutes
the access to protected parameters after 5 consecutive frustrated
attempts of guessing the correct password.
MASTER PASSWORD
The Master Password is intended for allowing the user to define a
new password in the event of it being forgotten. The Master
Password doesn’t grant access to all parameters, only to the
Password Change parameter (PAS(). After defining the new
password, the protected parameters may be accessed (and modified)
using this new password.
The master password is made up by the last three digits of the serial
number of the controller added to the number 9000.
As an example, for the equipment with serial number 07154321, the
master password is 9 3 2 1.
PROGRAMS OF RAMP AND SOAK
This feature allows the creation of Ramp and Soak Setpoint Profiles
(Programs). Up to 20 different profiles with 9 segments each can
be programmed. Longer profiles of up to 180 segments can be
created by linking 2 or more profiles together.
The figure below displays a profile model:
Fig. 4 - Example of a Ramp and Roak
Once a profile is defined and selected for execution (parameter EPr
in the operating level), the controller starts to generate the SP profile
automatically in accordance with the elaborated program.
To execute a profile with fewer segments just program 0 (zero) for the
time intervals that follow the last segment to be executed.
SV
Time
T1
T2
T3
SP0
SP1
SP2
SP3
T4=0
Fig. 5 - Program example with few segments
The program tolerance defines the maximum deviation between PV
and SP for the execution of the profile. If this deviation is exceeded,
the program will be halted until the deviation falls to within the
tolerance band.
Programming 0 (zero) in the “Ptol” parameter disables the program
tolerance and the profile execution will continue regardless of the PV
value (time priority as opposed to SP priority).
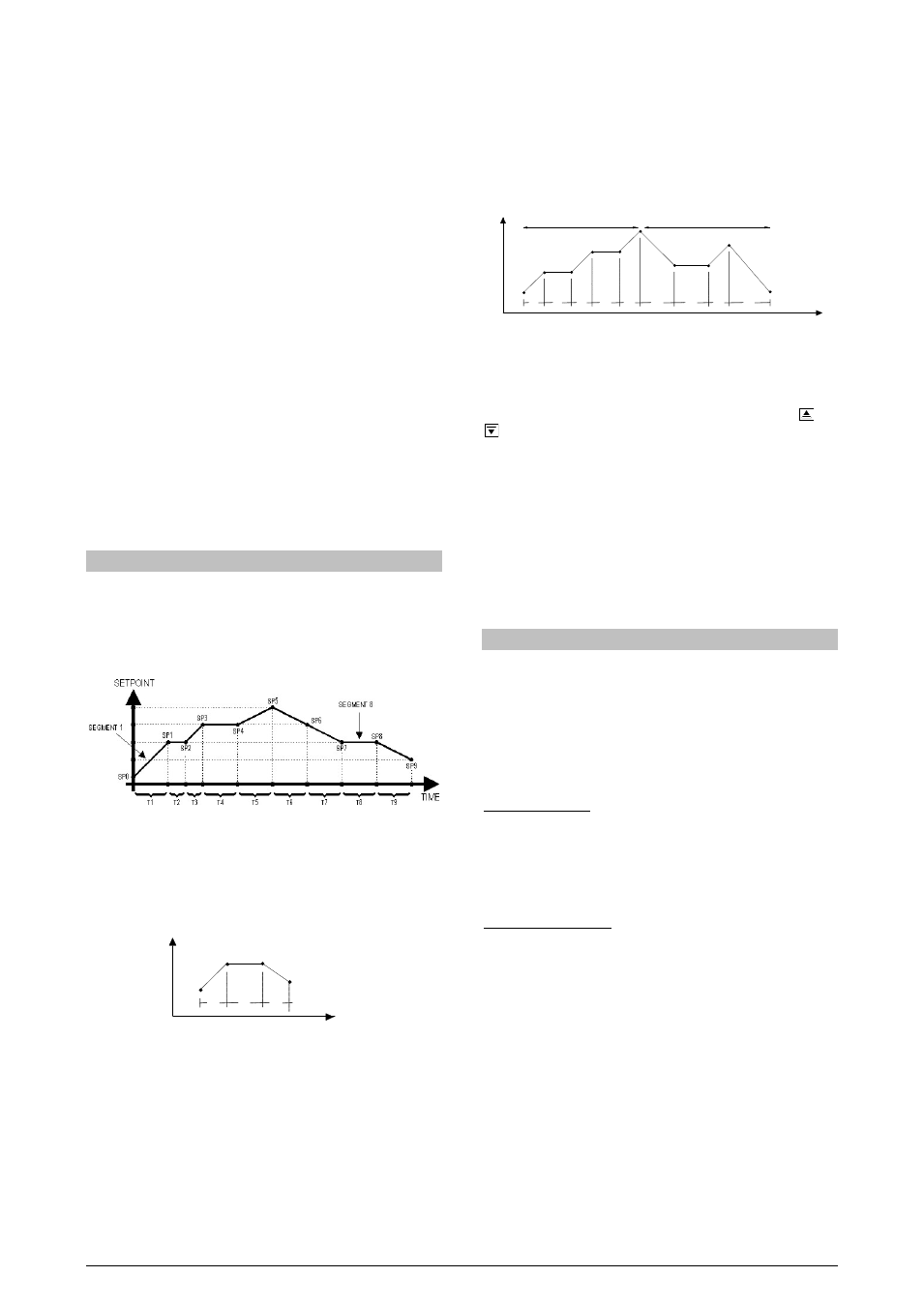
LINK OF PROGRAMS
It is possible to create a more complex program, with up to 180
segments, joining the 20 programs. This way, at the end of a program
execution the controller immediately starts to run the next one, as
indicated in the “LP".
To force the controller to run a given program or many programs
continuously, it is only necessary to link a program to itself or the last
program to the first.
SV
Time
T1
T2
T3
T4
T5
T1
T2
T3
T4
SP0
SP1
SP2
SP3
SP4
SP5 / SP0
SP1 SP2
SP3
SP4
Program 1
Program 2
Fig. 6 - Example of interlinked programs
EVENT ALARM
The Event Alarm function associates the alarms to specific segments
of a program. The information of which alarms are to be activated or
deactivated is given in parameters “ PE1“ to “ PE9. Press the
and
keys until the desired alarm numbers are displayed.
The Event Alarm requires that the Alarm function be configured as
“rS “.
Notes:
1. If PtoL is different than zero, the controller will wait for the PV to
reach the first program set point SP0 in order to start the program
execution. Otherwise, it will start promptly.
2. Should any power failure occur, the controller resumes the
program execution at the beginning of the segment that was
interrupted.
DETERMINATION OF PID PARAMETERS
The determination (or tuning) of the PID control parameters in the
controller can be carried out in an automatic way and auto-adaptative
mode. The automatic tuning is always initiated under request of the
operator, while the auto-adaptive tuning is initiated by the controller
itself whenever the control performance becomes poor.
Only PID parameters (Control Output 1) can be automatically
calculated by N120. Control Output 2 Proportional Band and Overlap
must be manually adjusted.
Automatic tuning: In the beginning of the automatic tuning the
controller has the same behavior of an ON/OFF controller, applying
minimum and maximum performance to the process. Along the tuning
process the controller's performance is refined until its conclusion,
already under optimized PID control. It begins immediately after the
selection of the options FAST, FULL, RSLF or TGHT, defined by the
operator in the parameter ATUN.
Auto-adaptive tuning: Is initiated by the controller whenever the
control performance is worse than the one found after the previous
tuning. In order to activate the performance supervision and auto-
adaptative tuning, the parameter ATUN must be adjusted for SELF,
RSLF or TGHT. The controller's behavior during the auto-adaptative
tuning will depend on the worsening of the present performance. If
the maladjustment is small, the tuning is practically imperceptible for
the user. If the maladjustment is big, the auto-adaptive tuning is
similar to the method of automatic tuning, applying minimum and
maximum performance to the process in ON/OFF control.