Pid control, Time proportional pid control, Linear pid control – Red Lion PAX2C User Manual
Page 49: Manual control mode, Mode transfer, Automatic control mode, Proportional band, Integral time
49
PID CONTROL
In PID Control, the controller processes the input and then calculates a
control output power value by use of a specialized Proportional Band,
IntegralTime, and Derivative Time control algorithm. The system is controlled
with the new output power value to keep the process at the setpoint. The Control
Action for PID Control can be set to reverse for heating (output on when below
the setpoint) or direct for cooling (output on when above the setpoint)
applications.For heat and cool systems, the heat and cool outputs are both used.
The PID parameters can be established by using Auto-Tune, or they can be
Manually tuned to the process.
TIME PROPORTIONAL PID CONTROL
In Time Proportional applications, the output power is converted into output
On time using the Cycle Time. For example, with a four second cycle time and
75% power, the output will be on for three seconds (4 × 0.75) and off for
one second.
The cycle time should be no greater than 1/10 of the natural period of
oscillation for the process. The natural period is the time it takes for one
complete oscillation when the process is in a continuously oscillating state.
LINEAR PID CONTROL
In Linear PID Control applications, the Analog Output Assignment ANAS is set
to % Output Power, OP. The Analog Low Scaling, ANLO , is set to 0.0 and the
Analog High Scaling, ANHI, is set to 100.0. The Analog Output will then be
proportional to the PID calculated % output power for Heat or Cooling per the
Control Action OPAC. For example, with 0 VDC to 10 VDC (scaled 0 to 100%)
and 75% power, the analog output will be 7.5 VDC.
MANUAL CONTROL MODE
In Manual Control Mode, the controller operates as an open loop system
(does not use the setpoint or process feedback). The user adjusts the percentage
of power through the % Power display to control the output power. Manual
operation provides 0 to 100% power to the HEAt output and -100 to 0% power
to the COOL output. The Low and High Output Power limits are ignored when the
controller is in Manual.
MODE TRANSFER
When transferring the controller mode between Automatic and Manual, the
controlling outputs remain constant, exercising true “bumpless” transfer. When
transferring from Manual to Automatic, the power initially remains steady, but
Integral Action corrects (if necessary) the closed loop power demand at a rate
proportional to the Integral Time.
AUTOMATIC CONTROL MODE
In Automatic Control Mode, the percentage of output power is automatically
determined by PID or On/Off calculations based on the setpoint and process
feedback.
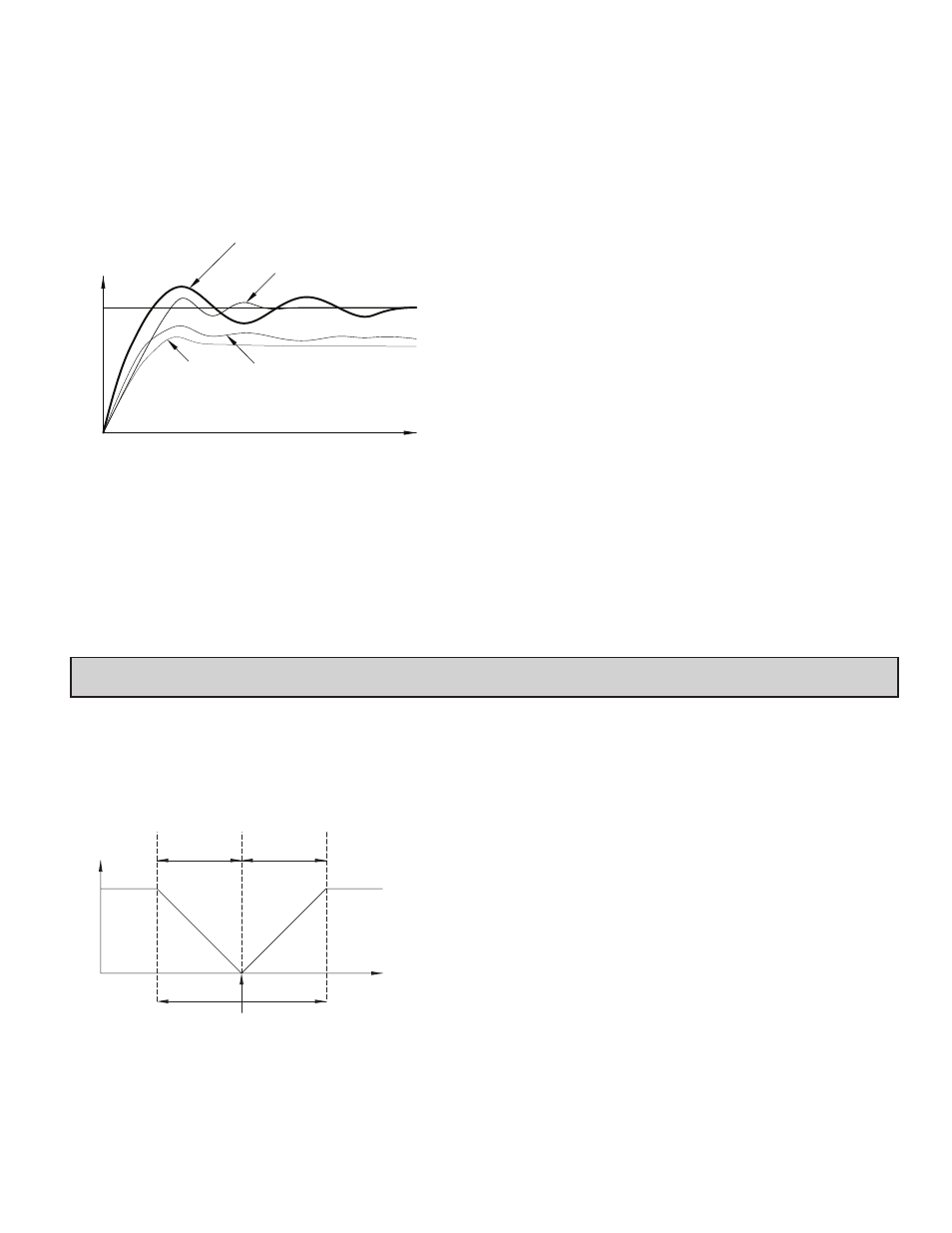
TYPICAL PID RESPONSE CURVE
pid COnTrOl
PROPORTIONAL BAND
Proportional band is defined as the “band” of temperature the process
changes to cause the percent output power to change from 0% to 100%. The
band may or may not be centered about the setpoint value depending upon the
steady state requirements of the process. The band is shifted by manual offset or
integral action (automatic reset) to maintain zero error. Proportional band is
expressed as percent of input sensor range.
Example: Thermocouple type T with a temperature range of 600°C is used and
is indicated in degrees Celsius with a proportional band of 5%. This yields a
band of 600°C X 5% = 30°C.
The proportional band should be set to obtain the best response to a
disturbance while minimizing overshoot. Low proportional band settings (high
gain) result in quick controller response at expense of stability and increased
overshoot. Settings that are excessively low produce continuous oscillations at
setpoint. High proportional band settings (low gain) result in a sluggish response
with long periods of process “droop”. A proportional band of 0.0% forces the
controller into ON/OFF control mode with its characteristic cycling at setpoint
(See ON/OFF Control for more information).
INTEGRAL TIME
Integral time is defined as the time, in seconds, in which the output due to
integral action alone equals the output due to proportional action with a constant
process error. As long as a constant error exists, integral action repeats the
proportional action every integral time. Integral action shifts the center point
position of the proportional band to eliminate error in the steady state. The units
of integral time are seconds per repeat.
Integral action (also known as “automatic reset”) changes the output power
to bring the process to setpoint. Integral times that are too fast (small times) do
not allow the process to respond to the new output value. This causes over
compensation and leads to an unstable process with excessive overshoot.
Integral times that are too slow (large times) cause a slow response to steady
state errors. Integral action may be disabled by setting the time to zero. If time
is set to zero, the previous integral output power value is maintained.
If integral action is disabled, manual reset is available by modifying the
output power offset (OPOF initially set to zero) to eliminate steady state errors.
This parameter appears in unprotected parameter mode when integral time is set
to zero. The controller has the feature to prevent integral action when operating
outside the proportional band. This prevents “reset wind-up”.
SETPOINT
100
0
HEATING
COOLING
TEMPERATURE
P-BAND
P-BAND
DIRECT
ACTING
REVERSE
ACTING
OUTPUT
POWER (%)
Digital
Output
Digital
Output
SP
TIME
P & I
P & I & D
P only
P & D
INPUT