Pid p, Pid ), Prop – Red Lion PAX2C User Manual
Page 33: Intt, Dert, Fltr, Opof
33
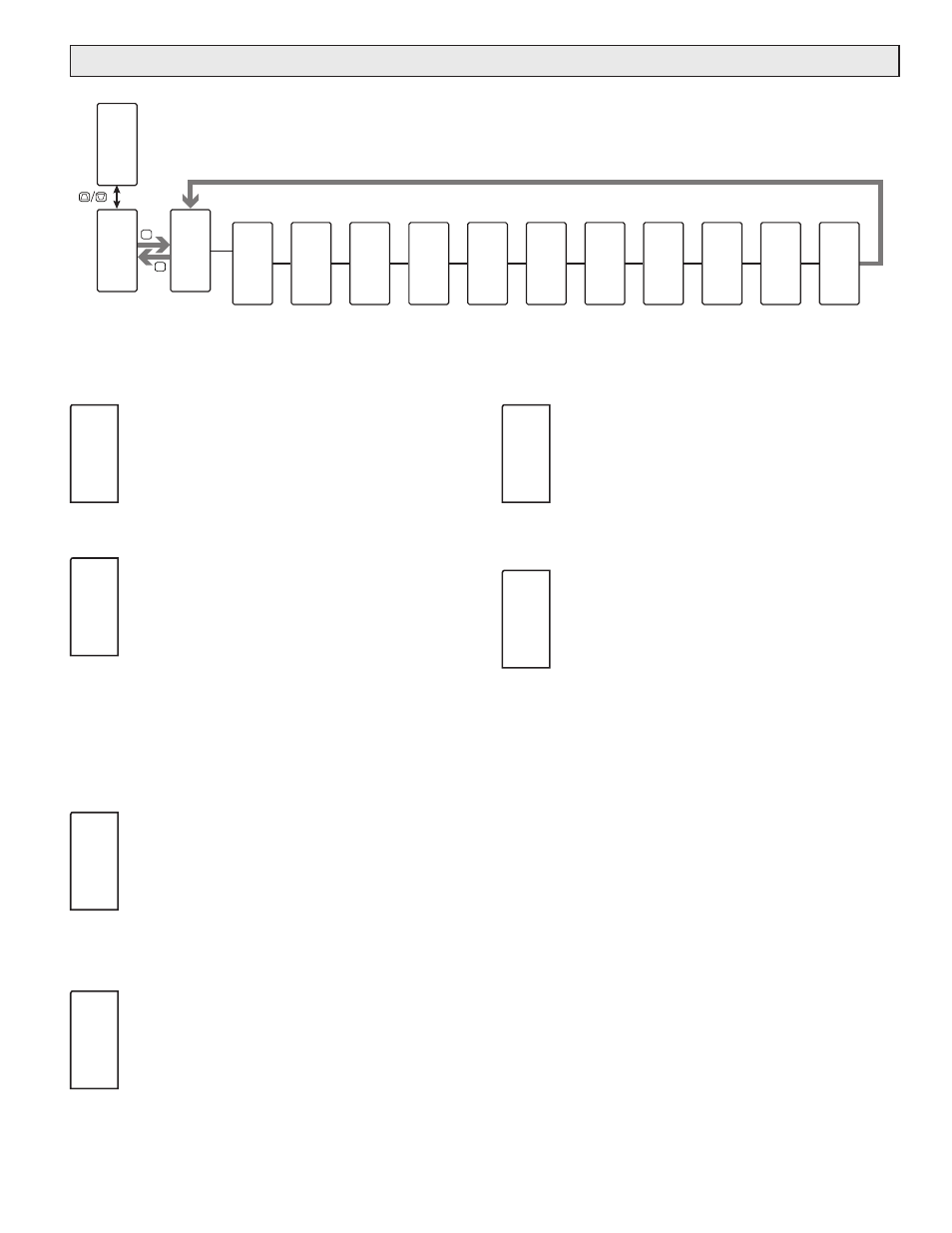
PID
Parameter
Selection
Primary
Proportional
Band Value
Primary
Integral
Time Value
F1
F2
P
D
Pro
N O
Pro
P i d
Pid
P i d
Pid
P r i
SEL
ProP
4 . 0
Pri
Intt
1 2 0
Pri
Primary
Derivative
Time Value
dErt
3 0
Pri
Primary
Power Filter
Value
FLtr
1 . 0
Pri
Primary
Output Offset
Value
OPOF
0 . 0
Pri
Alternate
Proportional
Band Value
ProP
4 . 0
ALt
Alternate
Integral
Time Value
Intt
1 2 0
ALt
Alternate
Derivative
Time Value
dErt
3 0
ALt
Alternate
Power Filter
Value
FLtr
1 . 0
ALt
Alternate
Output Offset
Value
OPOF
0 . 0
ALt
pid p
arameTers
: pid p
arameTers
(Pid)
PID PARAMETER SELECTION
Pri
ALt
Select the desired set of PID Values (Primary or Alternate) that
will be used in the PID calculation. The PID Parameter Selection
function can also be configured in the Display Parameter LOCS Menu
(Pid LOCS) or a User Input or Function Key can be assigned to the PID
Parameter Selection Function.
PRIMARY/ALTERNATE PROPORTIONAL BAND
0
to
999.9
%
The Proportional Band property, entered as a percentage of the full
input range, is the amount of input change required to vary the output
full scale. For temperature inputs, the input range is fixed per the
entered thermocouple or RTD type. For process inputs, the input
range is the difference between the Process at 0%, and Process at
100% values. The Proportional Band is adjustable from 0.0% to 999.9%, and
should be set to a value that provides the best response to a process disturbance
while minimizing overshoot. A Proportional Band of 0.0% forces the controller
into On/Off Control with its characteristic cycling at setpoint. The optimal value
may be established by invoking Auto-tune.
PRIMARY/ALTERNATE INTEGRAL TIME
0
to
65000
seconds
The Integral Time is the time in seconds that it takes the integral
action to equal the proportional action, during a constant process
error. As long as the error exists, integral action is repeated each
Integral Time. The higher the value, the slower the response. The
optimal value may be established by invoking autotune.
PRIMARY/ALTERNATE DERIVATIVE TIME
0
to
9999
seconds
The Derivative Time is the seconds per repeat that the controller
looks ahead at the ramping error to see what the proportional
contribution will be and then matches that value every Derivative
Time. As long as the ramping error exists, the derivative contribution
is repeated every derivative time. Increasing the value helps to
stabilize the response. Too high of a value, coupled with noisy signal
processes, may cause the output to fluctuate too greatly, yielding poor control.
Setting the time to zero disables derivative action. The optimal Derivative Time
may be established by invoking auto-tune.
PRIMARY/ALTERNATE POWER FILTER
0
to
60.0
seconds
The Power Filter is a time constant, entered in seconds, that
dampens the calculated output power. Increasing the value increases
the dampening effect. Generally, a Power Filter in the range of one-
twentieth to one-fiftieth of the controller’s integral time (or process
time constant) is effective. Values longer than these may cause
controller instability due to the added lag effect.
PRIMARY/ALTERNATE OUTPUT OFFSET
-100.0
to
100.0
This value effectively shifts the zero output point of the module’s
output power calculation. This feature is most commonly used in
proportional-only applications to remove steady-state error.
Pid
Pri
SEL
ProP
4.0
Intt
120
dErt
30
FLtr
1.0
OPOF
0.0