Nx242 digital tdcontroller partial block diagram, 3 protección vcas y vceqs, Control de desplazamiento – Nexo GEO S12 User Manual
Page 80: Control de temperatura, Control dinámico fisiológico, Nexo, Nx242-es4
Página 80/115
C
ONTROLADOR
DIGITAL
NEXO
NX242-ES4
PARA
GEO
S12
3
R+L
2
L
1
R
Voice Coil Temp.
ChassisTemp
Command
PHYSIO 1
Command
PEAK SIMULATION
PATCH
Disp.
Command
Voice Coil Temp.
ChassisTemp.
LF TEMPERATURE
0
INPUT VU-METER
0
A/D
EQ
A/D
DAC
MUTE
EQ
EQ
SHELVING
SHELVING
A/D
EQ
Command
HF TEMPERATURE
VCA
FALLBACK
AMP VOLTAGE
Signal
AMP POWER
AMP GAIN
Command
displacement
DISPLACEMENT 1
DELAY 1
ATT/REL.
5
SENSE 1
2
L
3
R+L
1
R
INPUT VU-METER
INPUT R
INPUT L
OUTPUT
CHANNEL 4
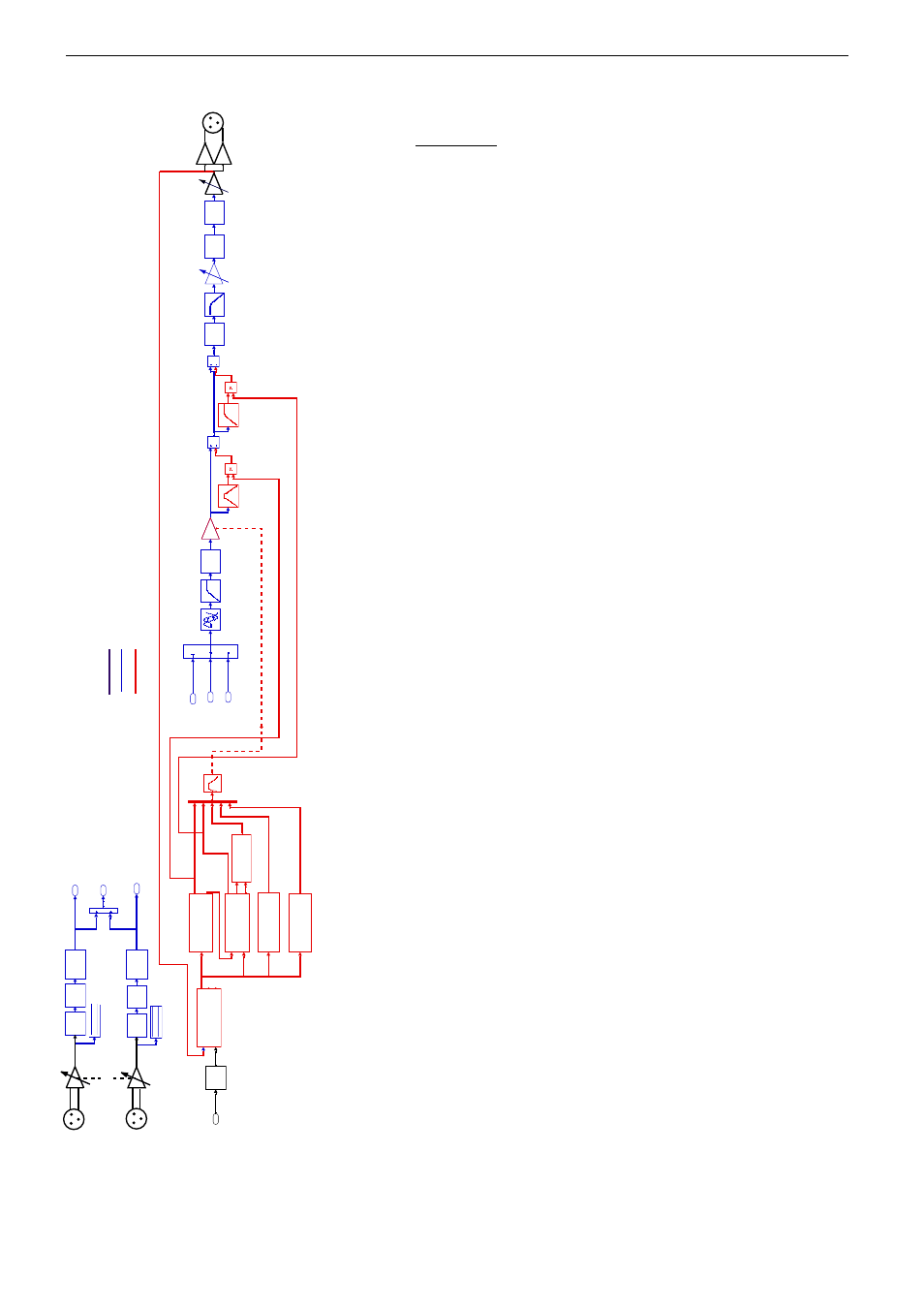
NX242 Digital TDcontroller Partial BLOCK DIAGRAM
Analogue path
Digital Audio
Digital servo & protections
HEADROOM
10.1.3 Protección
VCAs y VCEQs
Cada canal tiene su propio proceso de simulación y protección.
Cada canal de audio contiene una combinación de etapas de ganancia
controlada (llamémoslas VCAs como en circuitería analógica). Estos
VCAs forman parte de complejas cadenas de procesado que funcionan
de forma selectiva con la frecuencia, de forma similar a un ecualizador
dinámico controlado por voltaje (VCEQ).
Cada VCEQ y VCA es controlado por la síntesis de varias señales que
llegan desde los diferentes puntos de detección. Esa síntesis es de
hecho la envolvente de esas señales, con tiempos de ataque y relajación
optimizados para cada VCEQ y VCA (dependiendo de su banda de
frecuencia y la caja seleccionada).
Control de desplazamiento
La señal de la entrada “sense” se pasa por un filtro que produce una
señal que es proporcional al desplazamiento de la bobina móvil. Esta
señal, después de ser rectificada, se compara con un umbral pre-fijado
en base a mediciones de laboratorio. Si se excede el umbral, la señal se
envía al buffer de control del VCEQ, al tiempo que el VCEQ actúa como
un limitador instantáneo (con un tiempo de ataque muy corto) para
impedir que la excursión exceda los valores permitidos.
Control de temperatura
La señal de la entrada “sense” se pasa por un filtro (uno por transductor)
que crea una señal proporcional a la corriente instantánea de la bobina
móvil del transductor. Después de ser rectificada, la señal se integra con
constantes de tiempo de ataque y relajación equivalentes a las
constantes de tiempo de la temperatura de la bobina y el chasis,
produciendo un voltaje que es representativo de la temperatura
instantánea de la bobina. Cuando el voltaje resultante excede el valor
correspondiente a la temperatura máxima de uso para un transductor, el
VCA se activa para reducir el nivel de salida de señal del NX242 hasta
que la temperatura efectiva baje del valor máximo.
Para evitar efectos perjudiciales debidos a constantes de tiempo de
relajación muy largas producidas por la señal de detección de
temperatura (salida reducida en el sistema durante un periodo largo,
efectos de “bombeo”, etc.), la señal de detección se modula por otro
voltaje integrado con constantes de tiempo más rápidas que se adaptan
a la percepción subjetiva de la presión sonora. Esto permite al
controlador reducir la duración efectiva de la limitación por temperatura y
lo hace sonar más natural, al tiempo que se mantiene toda la efectividad
de la protección y los umbrales de protección se mantienen lo más altos
posible.
Control dinámico fisiológico
El control dinámico fisiológico está diseñado para evitar los efectos
indeseados producidos por constantes de tiempo de ataque muy largas.
Al anticipar la activación del limitador de temperatura, impide que
aparezca de repente un nivel elevado de señal y se mantenga el
suficiente tiempo como para disparar la limitación por temperatura. Sin
esto, habría un variación de nivel brusca y retardada que sonaría muy
evidente y artificial.