Configuring the modbustcp master – Watlow Silver Series User Manual
Page 203
Security
195
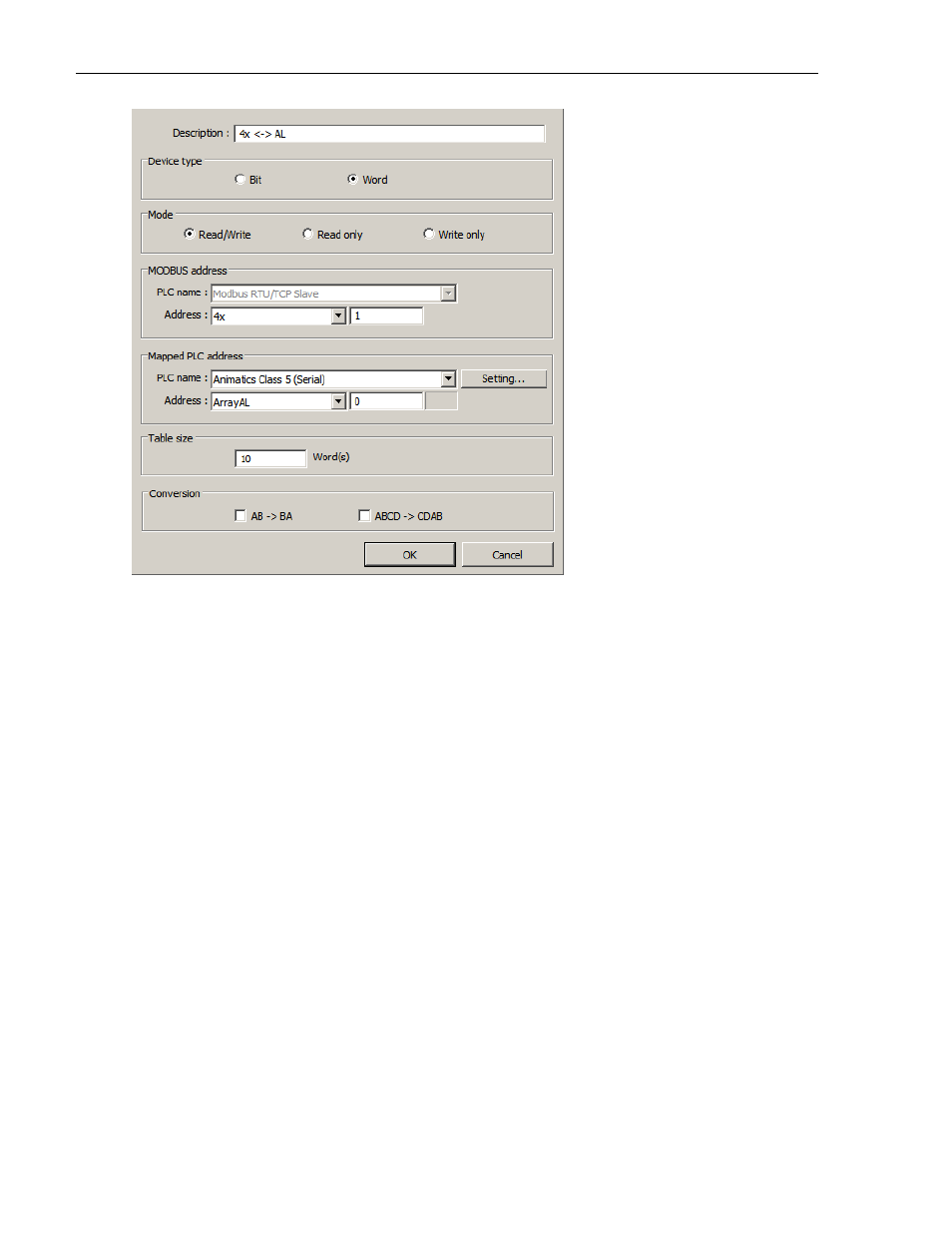
3. Click the Add button to map a Modbus register.
In this example, Modbus registers are being mapped to array elements in an Animatics Smartmotor
controller.
Description: Enter a text description for this mapping.
Device Type: Select whether the mapped data is a Bit or Word address.
Mode: Configure the access privileges.
MODBUS address: Specify the Modbus address.
Mapped PLC address: Specify the PLC and address to which the Modbus address will be mapped. In this
example, Modbus registers are being mapped to the AL[] array in the Animatics Smartmotor.
Table size: Specify how many words or bits are to be mapped. The table starts with the addresses
configured above. In this example, 10 Modbus addresses are being mapped.
Conversion: AB
->
BA swaps the byte order during the mapping, ABCD
->
CDAB swaps the word order.
4. Click the OK button.
5. Repeat for each address type to be mapped.
Configuring the ModbusTCP Master
The ModbusTCP Master must be configured to communicate with the HMI.
In general, there will be a one-to-one matching of the Modbus address and the address mapped in the PLC. If 32-bit
types are used on one side, and 16-bit types are used on the other, addresses may be skipped.
When the ModbusTCP Master requests data, the HMI will send the request to the mapped device, and return the
data to the ModbusTCP Master. In the Animatics example, when the ModbusTCP Master requests register 4x1, the
HMI will request the data from Animatics register ArrayAL[0], and return the data to the ModbusTCP Master.
1010-1007, Rev. 10