IAI America LSAS-N15HM User Manual
Page 59
1
1. Notes on Operation
43
11.2.2
Serial Encoder Pseudo Absolute Specification
In the case of an actuator of the serial encoder pseudo absolute specification, when a home return
command is issued the actuator moves by approx. 16 mm from the current slider position and checks
the current position, after which the actuator can operate from that position.
Unlike actuators of the incremental specification, home return does not require the actuator moving to its
mechanical end.
(Note) If you are using an actuator of the serial encoder pseudo absolute specification, be sure to issue
a home return command after turning on the power or performing a software reset.
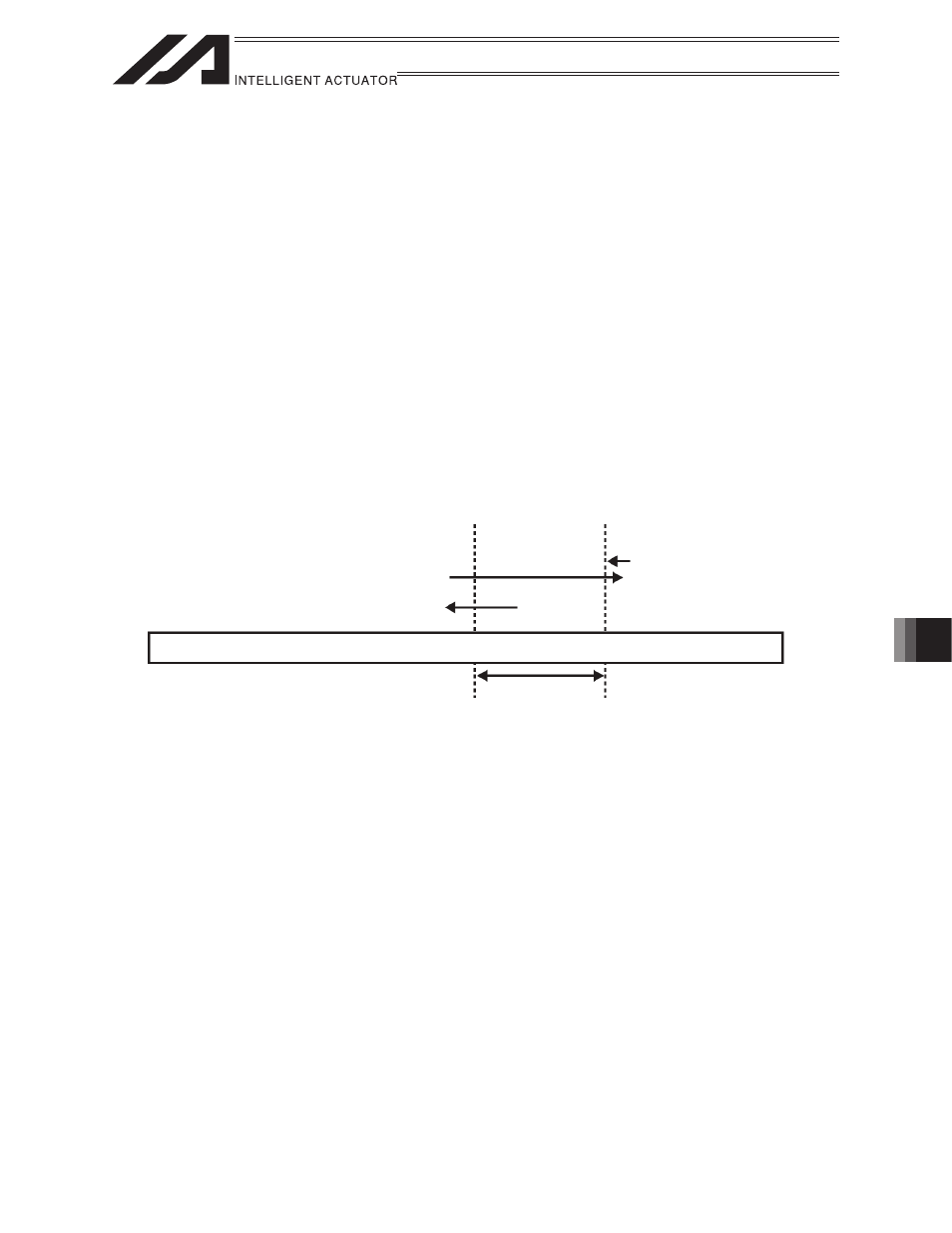
When a home return command is issued, the actuator checks the current position according to the
procedure below:
[1]
Upon receiving the home return command, the actuator moves in the direction of the parameter in
which the moving direction has been set.
[2]
After moving back and forth by approx. 16 mm, the actuator reads the current position information
based on the scale.
[3]
When the necessary information has been read, the actuator stops. The current position is confirmed
and the actuator can operate from that point.
* If the actuator hit an obstacle, etc., while moving approx. 16 mm and the current position information
could not be read, an error occurs. In this case, actuator operation is disabled.
Scale
[1]
[2]
[3]
Approx. 16 mm