CONTREX MLP-Drive User Manual
Page 87
3 - 49
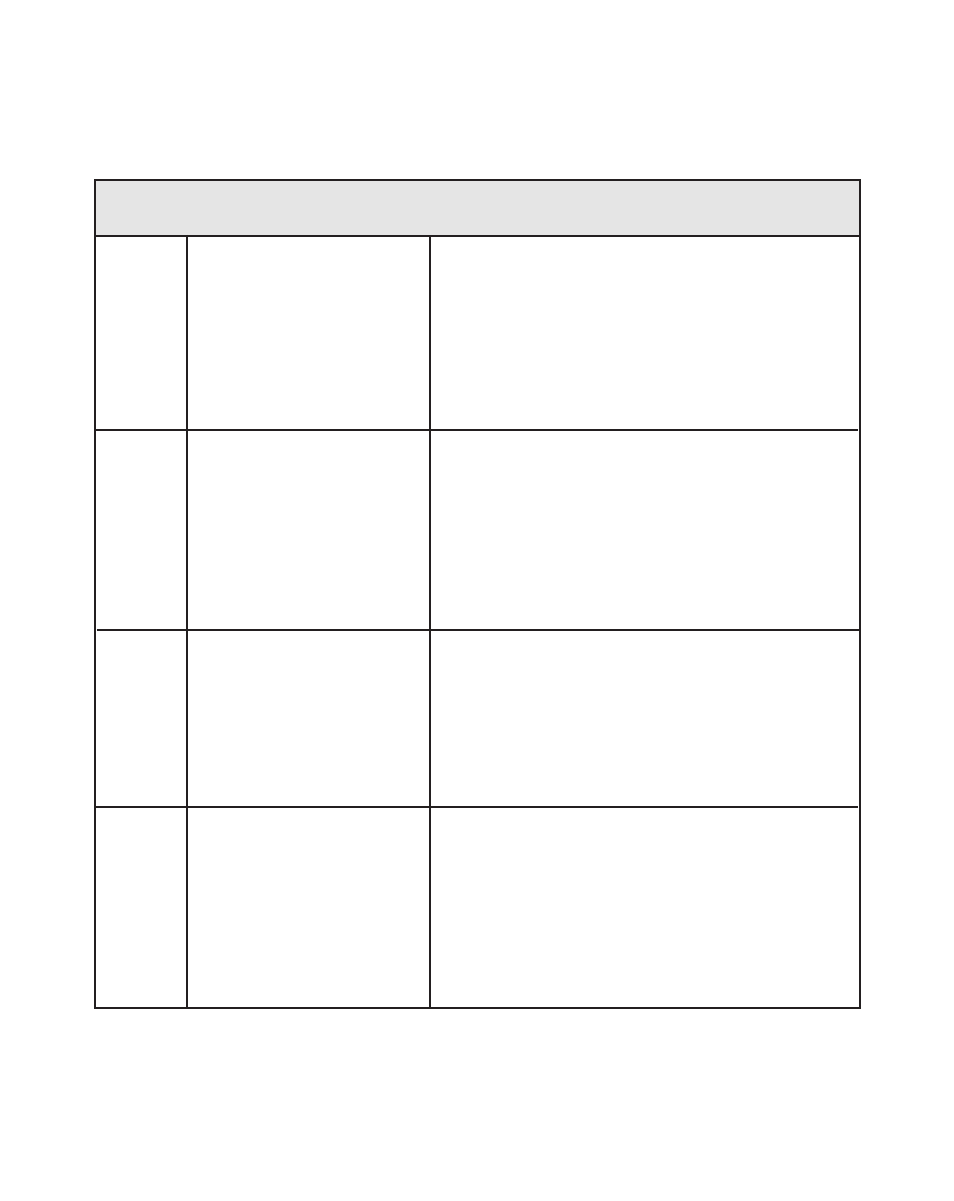
Table 3-40 Entering Master / Follower Tuning Control Parameters
CP
Parameter Name
Parameter Value
CP-65
Gain (Proportional)
CP-66
Integral
CP-67
Derivative
CP-69
Trim Authority
With Integral (CP-66) set to “0” , reduce
the Gain (CP-65) until the system becomes
unstable, then increase it slightly until the
system stabilizes. Reduced values will
increase Gain. To verify the stability of the
speed changes, you can access Tach
through either the Tach key or the Monitor
Parameter for Tach (MP-40).
While switching between the high and low
setpoints, decrease the Integral's default
value of “2000” until the speed error is
reduced within an acceptable time frame.
To verify the stability of the speed changes,
you can access Tach through either the
tach key or the Monitor Parameter for Tach
(MP-40).
The Derivative should not be adjusted in
most systems. However, sometimes in the
larger inertia systems you can improve
performance by lowering the Derivative
term to the point of instability and then
increasing it incrementally until the system
stabilizes.
Trim Authority determines how much
influence the PID term has on the control
output. If stability cannot be obtained
through the standard tuning procedure,
reduce CP-69 until stable tuning is
achieved. Setting CP-69 to zero will make
the MLP-Drive operate in open loop
(feedforward only).