CONTREX MLP-Drive User Manual
Page 84
3 - 46
Inverse Follower Mode Example
The Inverse Follower Mode Example demonstrates how the scaling and setpoint
Control Parameters are entered for a typical Inverse Follower mode of operation:
In a wire machine twisiting application, the Follower twists the wire as the Lead
pulls the wire. When the Follower is at the maximum revolutions per minute of
1800 RPM and the Lead is at the maximum revolutions per minute of 2000
RPM, then the twist length (lay) is at 2.0 inches. The Follower motor uses a
1200 PPR encoder and the Lead motor shaft is equipped with a 60 tooth ring
kit. Follower Setpoint 1 is setup for the twist lay of 2.0 inches. Follower
Setpoint 2 is setup for a twist lay of 5.0 inches.
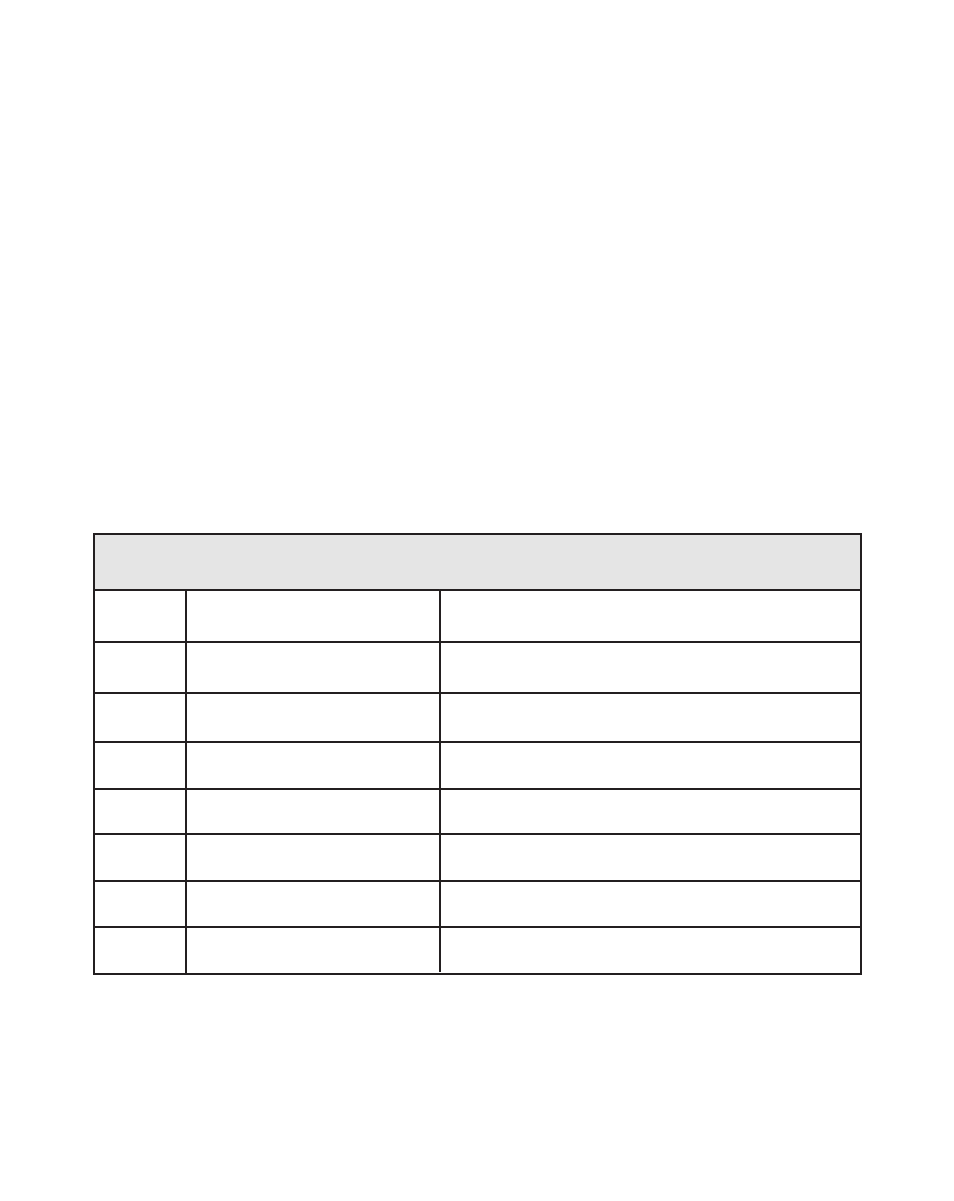
Table 3-36 shows the scaling Control Parameters that would be entered in the
MLP–Drive for this example.
Table 3-36 Inverse Follower Mode Control Parameters Example
CP
Parameter Name
Parameter Value
CP-62
Inverse Scaling
2
CP-30
PPR Lead
60
CP-31
PPR Feedback
1200
CP-33
Max RPM Lead
2000
CP-34
Max RPM Feedback
1800
CP-21
Follower E.U.
2.0
CP-03
Follower Setpoint 1
2.0
CP-04
Follower Setpoint 2
5.0
After the Scaling and the Follower Setpoints for your system have been entered, you
can enter the Acceleration/Deceleration Control Parameters for the Inverse Follower
mode. Acceleration/Deceleration is discussed in the following section.