C control channel, Table 26. cto counter timeout period – Rainbow Electronics MAX9258 User Manual
Page 30
MAX9257/MAX9258
After the control channel closes, there is a brief hand-
shake period (T3 in Figure 22 and T5 in Figure 23)
between the MAX9257 and the MAX9258. The
MAX9258 sends a special lock frame to the MAX9257
to indicate if PLL is still locked. The MAX9258 sends the
lock frame if the number of decoding errors didn’t
exceed a threshold in the last LVDS video phase ses-
sion. The MAX9258 features a proprietary VCO lock
that prevents frequency drift while in the control chan-
nel for extended periods of time. If MAX9257 receives
the lock frame, it understands that the MAX9258 is in a
locked state and sends a short training sequence. If the
lock frame is not received by the MAX9257, it assumes
that the MAX9258 is not locked and sends a long train-
ing sequence. After the short or long training sequence
is complete, the MAX9257 sends three special synchro-
nization words before entering the video phase.
Training sequence is used to resynchronize the
MAX9257/MAX9258 before the video phase starts.
The MAX9257/MAX9258 control channel duration is
independent of VSYNC. The control channel does not
close when VSYNC deasserts, which allows the use of
a VSYNC interrupt signal on VSYNC_IN. The control
channel must be closed by STO, ETO, or EF. If the con-
trol channel does not close before video data becomes
available, video data can be lost.
STO/ETO Timer Programming
STO and ETO can be programmed given the values of
T2, T4, and maximum values of T1, T3, and T5 (Figures
22, 23):
t
T
= pixel clock period, t
UCLK
= UART period
When spread spectrum is not enabled in MAX9257:
max(T1) = 2.5µs + (3 x t
T
) + (4 x t
UCLK
)
When spread spectrum is enabled in MAX9257:
max(T1) = 2.5µs + (1400 x t
T
) + (4 x t
UCLK
)
T2 = t
STO
T4 = t
ETO
When pixel clock frequency range (PRATE) is 00 or 01:
When pixel clock frequency range (PRATE) is 10 or 11:
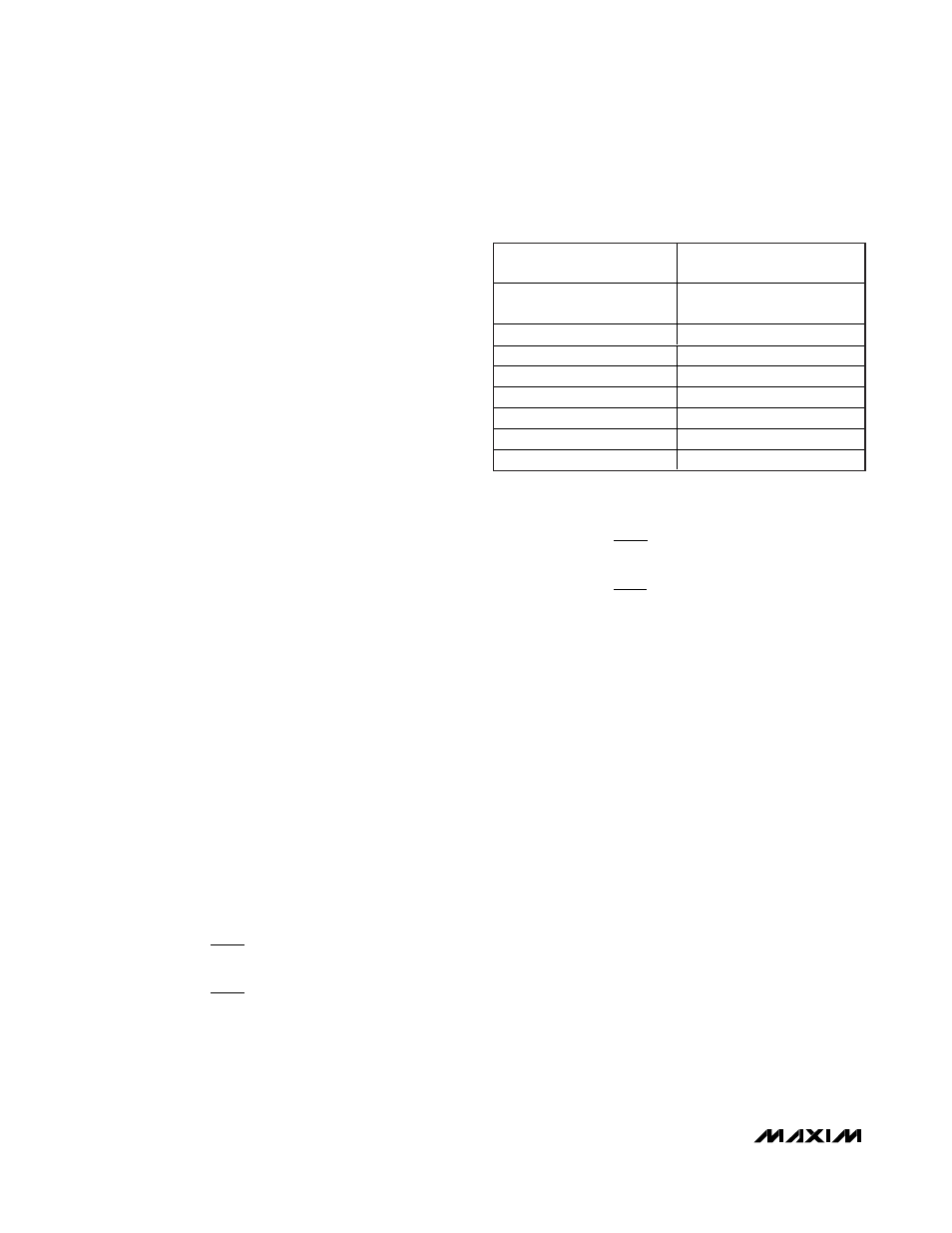
CTO Timer
The CTO (come-back timeout) timer temporarily or per-
manently blocks programming to the MAX9257/
MAX9258 registers. CTO keeps the MAX9257/ MAX9258
in bypass mode for the CTO timeout period (Table 26).
Bypass mode can only be exited when the CTO timer
expires. The CTO timer uses the UART bit times for its
counter. Note that STO and ETO timers use the pixel
clock while CTO uses the UART bit times. The UART
period t
UCLK
synchronizes with the UART bit times,
which synchronize every time the SYNC frame is sent.
When the CTO timer times out, INTEN bit in both
devices is set to 0 and the MAX9257/MAX9258 revert
back to base mode. If communication with the
MAX9257/MAX9258 is not needed after initial program-
ming is complete, CTO may be set to 000 (never come
back). In this case, CTO never expires and the
MAX9257/MAX9258 stay in bypass mode until they are
powered down. This prevents accidental programming
of the MAX9257/MAX9258 while ECU communicates
with the peripheral using a different UART protocol from
the MAX9257/MAX9258 UART protocol.
The overall CTO timeout is calculated as follows:
t
CTO
= t
UCLK
x CTO
max(
)
) (
)
max(
)
) (
)
T
t
t
t
T
t
t
t
STO
T
UCLK
ETO
T
UCLK
3
8
1090
20
5
8
1090
20
= ⎛
⎝⎜
⎞
⎠⎟
+
⎛
⎝⎜
⎞
⎠⎟
Ч
+
Ч
= ⎛
⎝⎜
⎞
⎠⎟
+
⎛
⎝⎜
⎞
⎠⎟
Ч
+
Ч
max(
)
) (
)
max(
)
) (
)
T
t
t
t
T
t
t
t
STO
T
UCLK
ETO
T
UCLK
3
8
546
20
5
8
546
20
= ⎛
⎝⎜
⎞
⎠⎟
+
⎛
⎝⎜
⎞
⎠⎟
Ч
+
Ч
= ⎛
⎝⎜
⎞
⎠⎟
+
⎛
⎝⎜
⎞
⎠⎟
Ч
+
Ч
30
______________________________________________________________________________________
Fully Programmable Serializer/Deserializer
with UART/I
2
C Control Channel
MAX9257 REG2[7:4]
MAX9258 REG3[7:4]
COUNTER USING UART BIT
TIMES
000
Never come back
(lockout)
001
16
010
32
011
48
100
64
101
80
110
96
111
112
Table 26. CTO Counter Timeout Period