Texas Instruments MSP50C6xx User Manual
Page 286
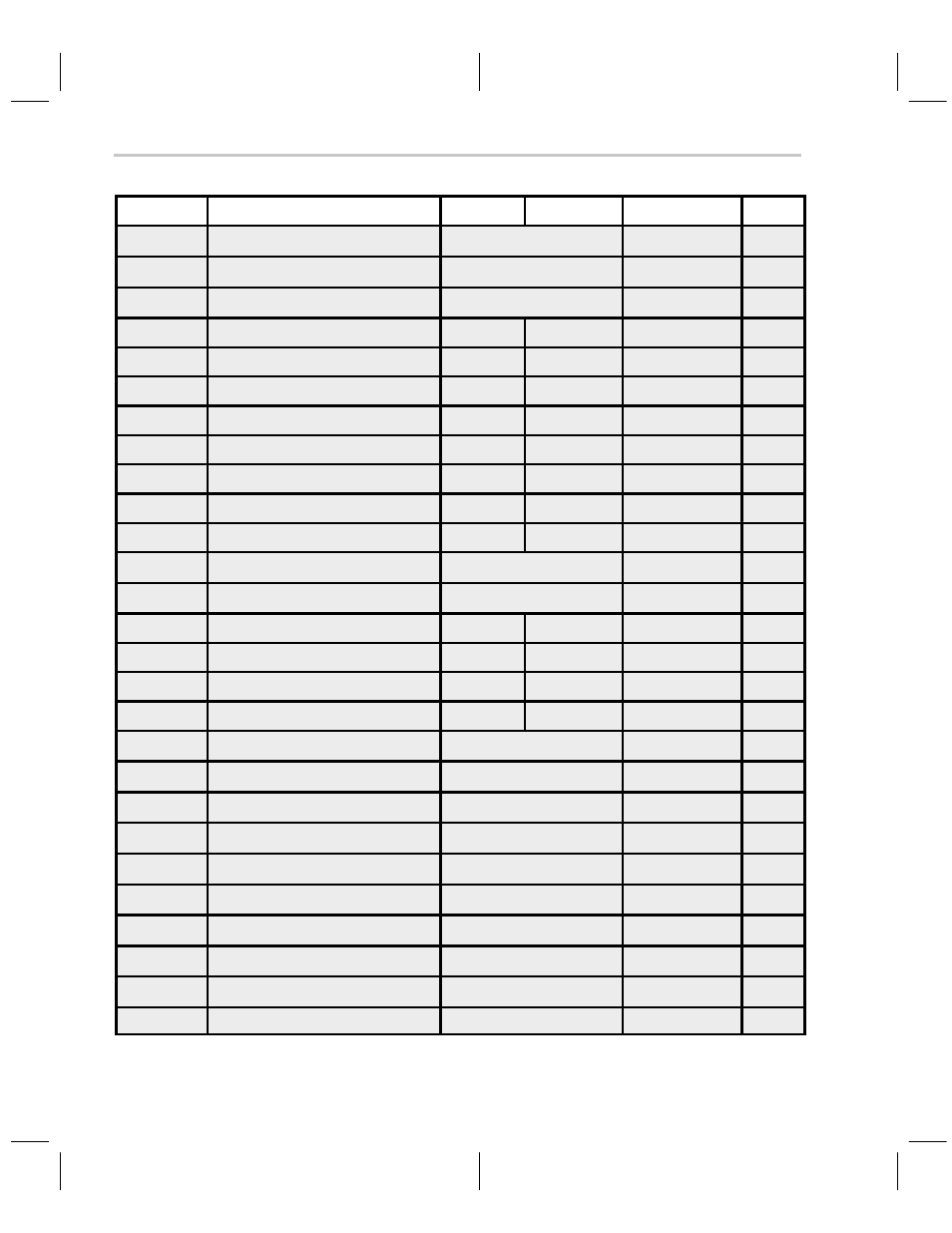
Instruction Set Summary
4-200
name
Class
With RPT, clk
Words, w
Clock, clk
dest [, src] [, src1] [,mod]
MOV
{adrs}, An[~] [, next A]
Table 4–46
Table 4–46
1a
MOV
An[~], {adrs} [, next A]
Table 4–46
Table 4–46
1a
MOV
{adrs}, *An
Table 4–46
Table 4–46
1b
MOV
An[~], imm16 [, next A]
2
2
N/R
2b
MOV
MR, imm16 [, next A]
2
2
N/R
2b
MOV
An, An~ [, next A]
1
1
n
R
+3
3
MOV
An[~], PH [, next A]
1
1
n
R
+3
3
MOV
SV, An[~] [, next A]
1
1
n
R
+3
3
MOV
PH, An[~] [, next A]
1
1
n
R
+3
3
MOV
An[~], *An[~] [, next A]
1
1
n
R
+3
3
MOV
MR, An[~] [, next A]
1
1
n
R
+3
3
MOV
{adrs}, Rx
Table 4–46
Table 4–46
4a
MOV
Rx, {adrs}
Table 4–46
Table 4–46
4a
MOV
Rx, imm16
2
2
N/R
4c
MOV
Rx, R5
1
1
n
R
+3
4d
MOV
SV, imm4
1
1
N/R
5
MOV
SV, {adrs}
†
1
1
n
R
+3
5
MOV
PH, {adrs}
Table 4–46
Table 4–46
5
MOV
MR, {adrs}
Table 4–46
Table 4–46
5
MOV
APn, {adrs}
Table 4–46
Table 4–46
5
MOV
STAT, {adrs}
Table 4–46
Table 4–46
5
MOV
TOS, {adrs}
Table 4–46
Table 4–46
5
MOV
{adrs}, PH
Table 4–46
Table 4–46
5
MOV
{adrs}, MR
Table 4–46
Table 4–46
5
MOV
{adrs}, STAT
Table 4–46
Table 4–46
5
MOV
{adrs}, STR
Table 4–46
Table 4–46
5
MOV
{adrs}, DP
Table 4–46
Table 4–46
5
† Signed multiplier mode resets UM (bit 1 in status register) to 0