Parker Hannifin SERVO CONTROLLER OEM6250 User Manual
Page 51
Appendix A – Tuning
4 5
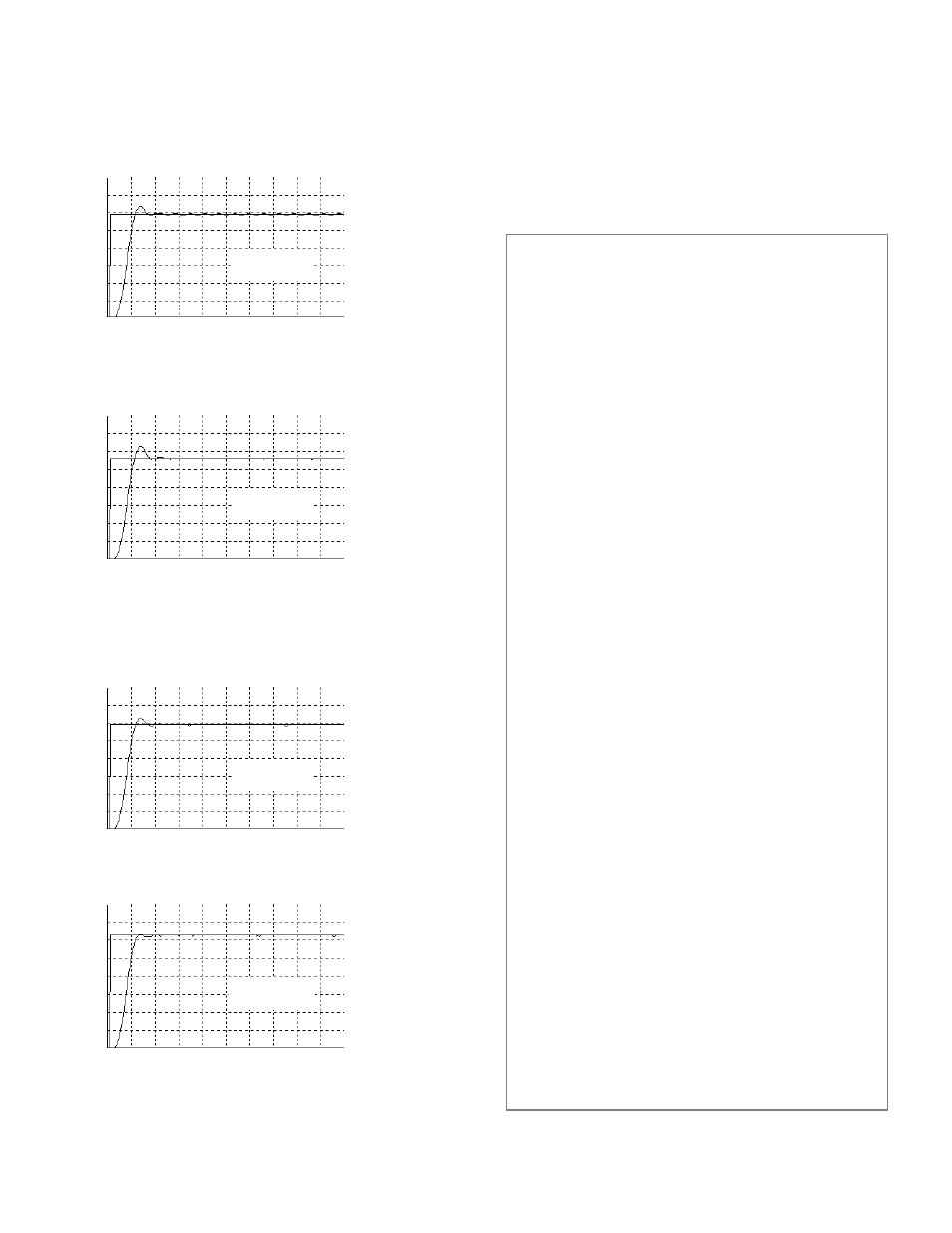
Step 8
After raising the SGV gain to 2.4, overshoot is reduced a
little, but chattering reappears. This means the gains are
still too high.
Next, we should lower the SGV gain until chattering stops.
SGP = 85
SGV = 2.4
Step 9
After lowering the SGV gain to 2.2 (even less than in the 2.3
setting in Step 7), chattering stops.
Next we should lower the SGP gain.
SGP = 85
SGV = 2.2
Step 10
Overshoot is reduced very little after lowering the SGP gain
to 70. (The SGV gain might have been lowered too much in
Step 9.)
Next, we should try raising the SGV gain again until the
overshoot is gone.
SGP = 70
SGV = 2.2
Step 11
When we raised the SGV gain to 2.52, the step response
became fast and very stable.
SGP = 70
SGV = 2.52
Step 12
Now that we have determined the appropriate SGP and SGV
gains, we can include them in the OEM6250’s setup
program. We put the gains in the setup program because we
want the OEM6250 to power up in a “ready state” for
motion. For more information on creating a setup program,
refer to the 6000 Series Programmer’s Guide.
Example Setup Program:
DEF SETUP
; Begin def. of "setup" program
DRIVE¯¯
; Disable both drives
INDAX2
; Place both axes in use
SSFR4
; Servo sampling frequency ratio
DRFLVL11
; Set drive fault level to
; "active high" for both axes
KDRIVE11
; Enable DISABLE ON KILL feature
; *********************************************
; * Setup for encoders (will need to switch *
: * between encoder and ANI feedback) *
; *********************************************
SFB1,1
; Select encoder feedback for
; both axes (subsequent scaling,
; gains, servo offset, PSET,
; and SMPER commands are specific
; to encoder feedback)
ERES4000,4000
; Set encoder resolution to
; 4,000 counts/rev
SCLA4000,4000
; Set scaling for programming
; accel/decel in revs/sec/sec
SCLV4000,4000
; Set scaling for programming
; velocity in revs/sec
SCLD4000,4000
; Set scaling for programming
; distances in revs
SGP70,70
; Set proportional feedback gain
SGV2.52,2.52
; Set velocity feedback gain
SMPER
.
001
,.
001 ; Set max. position error to
; 1
/
1000
of a
rev
(
4
encoder
counts
)
PSET0,0
; Set current position as
; absolute position zero
; *********************************************
; * Setup for ANI feedback (OEM6250-ANI ONLY) *
; *********************************************
SFB2,2
; Select ANI feedback for both
; axes (subsequent scaling,
; gains, servo offset, PSET,
; and SMPER parameters are
; specific to ANI feedback)
SCLA819,819
; Set scaling for programming
; accel/decel in volts/sec/sec
SCLV819,819
; Set scaling for programming
; velocity in volts/sec
SCLD819,819
; Set scaling for programming
; distances in volts
SGP1,1
; Set proportional feedback gain
SGI0,0
; Set integral feedback gain
SGV.5,.5
; Set velocity feedback gain
SMPER.01,.01
; Set max. position error to
; 1/100 of a volt (8 ANI counts)
PSET5,5
; Set current position as
; absolute position 5
SFB1,1
; Select encoder feedback for
; start of main program
; *********************************************
; * Insert other appropriate commands in the *
; * setup program (e.g., custom power-up mesg,*
; * scaling factors, input function assignmts,*
; * output function assignments, input and *
; * output active levels, etc.). See Prog. *
; * Guide, Chapter 3, for more information. *
; *********************************************
END
; End definition of "setup" prog
STARTP SETUP
; Assign the program named setup
; as the program to be executed
; on power up & reset