Tuning-related commands, Servo control techniques, Proportional feedback control ( sgp ) – Parker Hannifin SERVO CONTROLLER OEM6250 User Manual
Page 42: Oem6250 installation guide
3 6
OEM6250 Installation Guide
Tuning-Related Commands
More detailed information on each 6000 Series command
can be found in the 6000 Series Software Reference.
Tuning Gains:
SGP
..............
Sets the proportional gain in the PIV&F servo algorithm.
SGI
..............
Sets the integral gain in the PIV&F servo algorithm.
SGV
..............
Sets the velocity gain in the PIV&F servo algorithm.
SGAF
............
Sets the acceleration feedforward gain in the PIV&F
a
algorithm.
SGVF
............
Sets the velocity feedforward gain in the PIV&F
v
algorithm.
SGILIM
.......
Sets a limit on the correctional control signal that results
from the integral gain action trying to compensate for a
position error that persists too long.
SGENB
.........
Enables a previously-saved set of PIV&F gains. A set of
gains (specific to the current feedback source selected
with the
SFB
command) is saved using the
SGSET
command.
SGSET
.........
Saves the presently-defined set of PIV&F gains as a
gain
set (specific to the current feedback source on each
axis). Up to 5 gain sets can be saved and enabled at any
point in a move profile, allowing different gains at
different points in the profile.
Servo Performance:
INDAX
.........
Selects the number of available axes to use.
SSFR
............
Sets the ratio between the update rate of the move
trajectory and the update rate of the servo action. Affects
the
servo sampling update, the motion trajectory update,
and the
system update.
Feedback Setup:
SFB
..............
Selects the servo feedback device. Options (depending
on the product) are: encoder or ANI input.
IMPORTANT: Parameters for scaling, tuning gains,
max. position error (
SMPER
), and position offset (
PSET
)
are specific to the feedback device selected (with the
SFB
command) at the time the parameters are entered.
ERES
............
Encoder
resolution.
SMPER
.........
Sets the maximum allowable error between the
commanded position and the actual position as
measured by the feedback device. If the error exceeds
this limit, the controller activates the Shutdown output
and sets the DAC output to zero (plus any
SOFFS
offset). If there is no offset, the motor will freewheel to a
stop. You can enable the
ERROR
command to continually
check for this error condition (
ERROR.12-1
), and when
it occurs to branch to a programmed response defined in
the
ERRORP
program.
Servo Control Techniques
To ensure that you are tuning your servo system properly,
you should understand the tuning techniques described in
this section.
The OEM6250 employs a PIV&F servo control algorithm.
The control techniques available in this system are:
P .....
Proportional Feedback (control with SGP command)
I . . . . .
Integral Feedback (control with SGI command)
V . . . .
Velocity Feedback (control with SGV command)
F .....
Velocity and Acceleration Feedforward (control with the
SGVF
and SGAF commands, respectively)
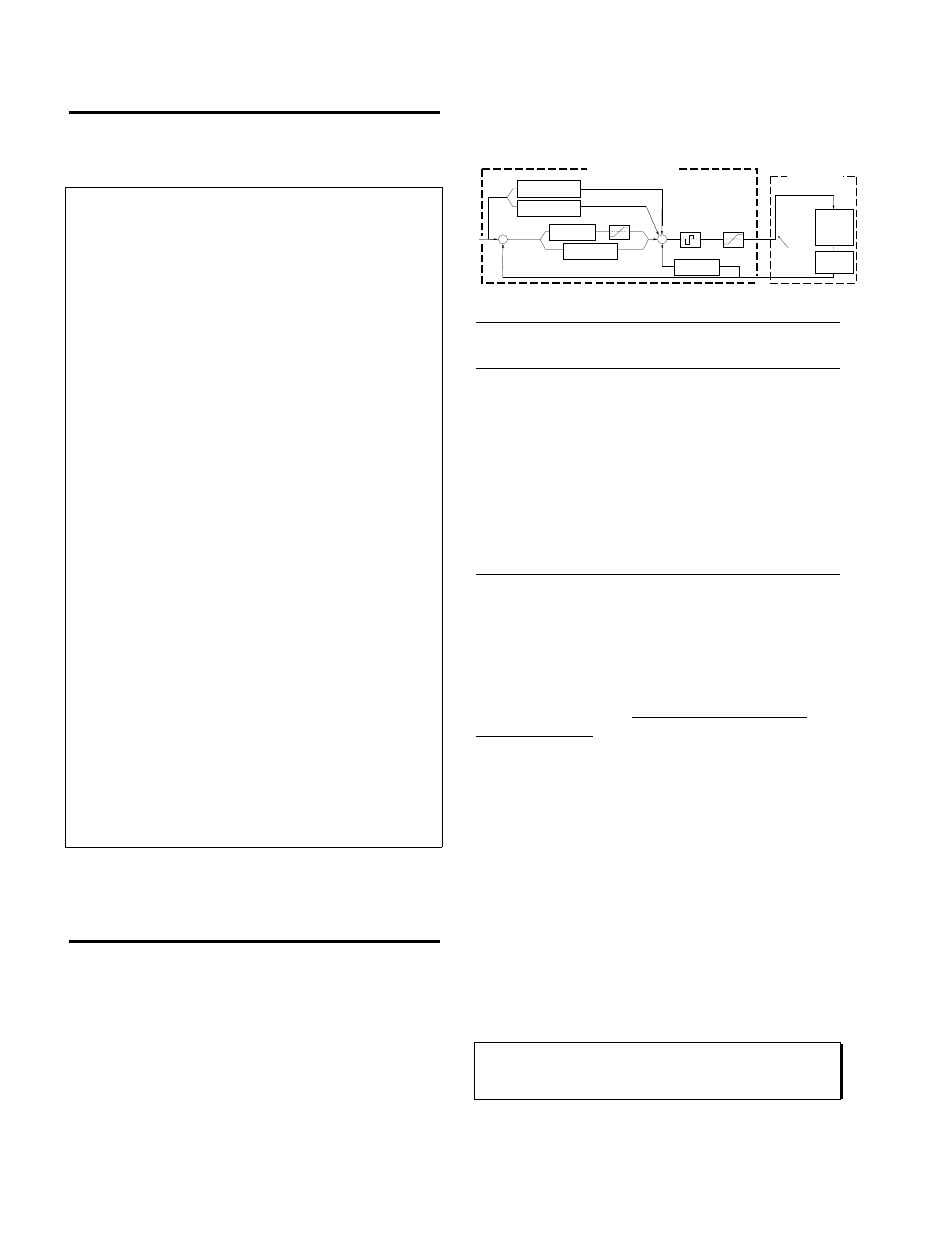
The block diagram below shows these control techniques
in relation to the servo control algorithm configuration.
The following table presents a condensed summary of each
control’s effect on the servo system.
Analog
Control Signal
Servo Control Algorithm
Velocity Feedforward
(
SGVF
)
Acceleration Feedforward
(
SGAF
)
+
+
+
-
+
-
+
+
Servo
Motor/Drive
System
-10V
+10V
Digital-to-Analog
Conversion (DAC)
Current, Torque, or Velocity
Control Signal
Servo System
Variable Integral Limit
(set with
SGILIM
)
Proportional Feedback
(
SGP
)
Integral Feedback
(
SGI
)
Velocity Feedback
(
SGV
)
Position
Feedback
Device
Dither Control
Frequency (
SDTFR
)
and Amplitude
(
SDTAMP
)
Gain
Stability
Damping
Disturbance
Rejection
Steady
State
Error
Tracking
Error
Proportional
(
SGP
)
Improve
Improve
Improve
Improve Improve
Integral
(
SGI
)
Degrade
Degrade
Improve
Improve Improve
Velocity
Feedback
(
SGV
)
Improve
Improve
----------
----------
Degrade
Velocity
Feedforward
(
SGVF
)
----------
----------
----------
----------
Improve
Acceleration
Feedforward
(
SGAF
)
----------
----------
----------
----------
Improve
Proportional Feedback Control (
SGP
)
Proportional feedback is the most important
feedback for stabilizing a servo system. Use
proportional feedback to make the servo system more
responsive (“stiff”), as well as reduce the steady state
position error. When the controller uses proportional
feedback, the control signal is linearly proportional to the
position error (the difference between the commanded
position and the actual position—see TPER command).
The proportional gain is set by the Servo Gain
Proportional (SGP) command.
Since the control is proportional to the position error,
whenever there is any disturbance (such as torque ripple or
a spring load) forcing the load away from its commanded
position, the proportional control can immediately output
a signal to move it back toward the commanded position.
This function is called disturbance rejection.
If you tune your system using only the proportional
feedback, increasing the proportional feedback gain (SGP
value) too much will cause the system response to be
oscillatory, underdamped, or in some cases unstable.
N O T E
The proportional feedback gain (
SGP
) should never be
set to zero, except when open-loop operation is desired.