Tuning the oem6250, Tuning-related commands – Parker Hannifin SERVO CONTROLLER OEM6250 User Manual
Page 30
2 4
OEM6250 Installation Guide
Tuning the OEM6250
Before tuning the
OEM6250, mount
and couple the
motors as required
for your
application.
To assure optimum performance, you should tune your servo system. The goal of the tuning
process is to define the gain settings, servo performance, and feedback setup (see command list
below) that you can incorporate into your application program. (Typically, these commands are
placed into a setup program – see examples in the Basic Operations Setup chapter of the 6000
Series Programmer’s Guide).
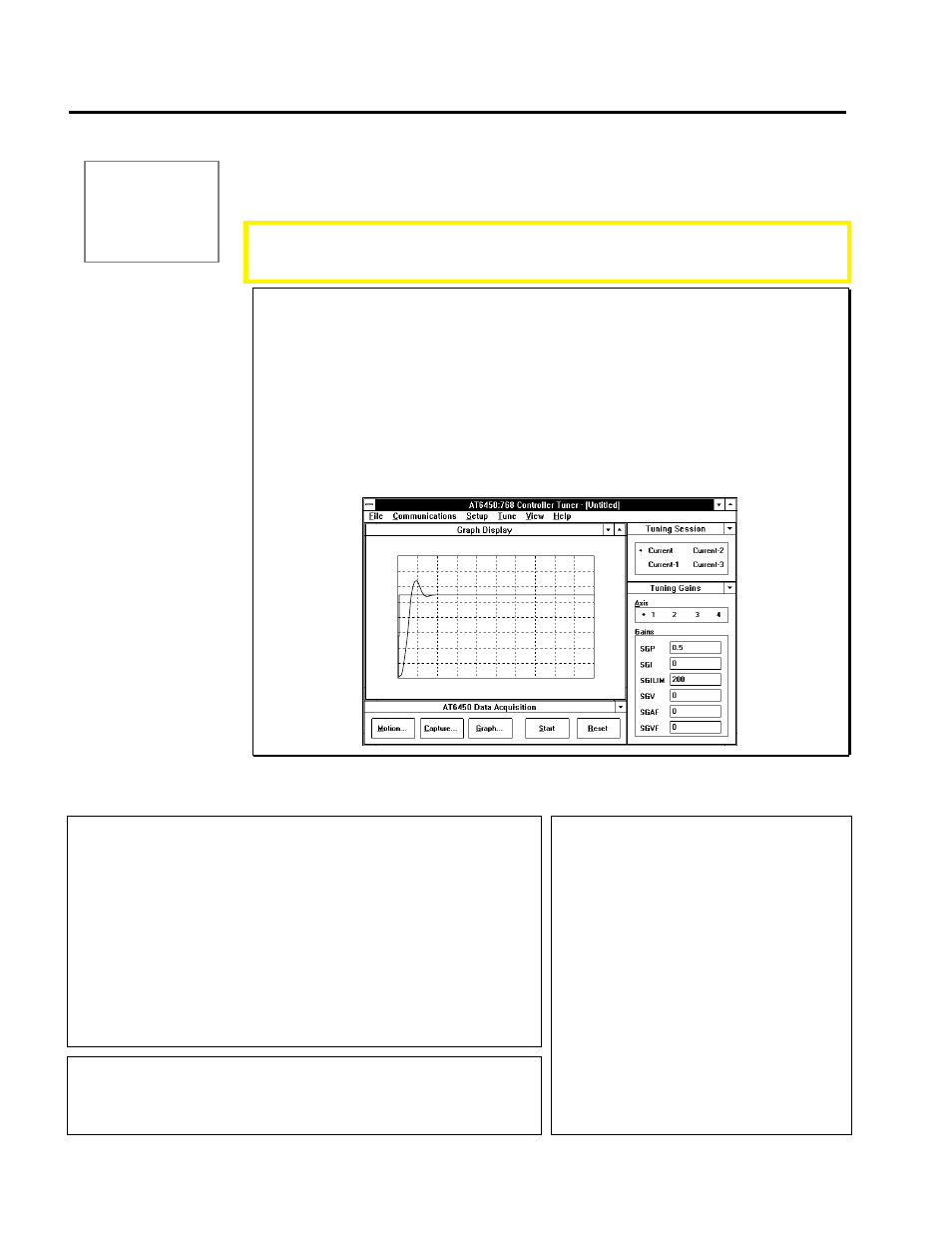
Servo Tuning Software Available
To effectively tune your 6000 servo controller (and any velocity drives you may be using),
use the interactive tuning features in the Servo Tuner™. It greatly improves your efficiency
and gives you powerful graphical tools to measure the performance of the system.
Servo Tuner is included as an integral element of Motion Builder™, an optional icon-based
programming tool. Servo Tuner is also available as an optional add-on module to Motion
Architect (it does not automatically come with the basic Motion Architect software package).
Instructions for using Servo Tuner are provided in the
Servo Tuner User Guide and in Motion
Builder’s online Help system and
Motion Builder Startup Guide & Tutorial.
To order Motion Builder or the Servo Tuner add-on module to Motion Architect, contact your
local Automation Technology Center (ATC) or distributor.
0.000
205.975
0.000
205.975
0
0
0
0
Axis 1 Comm Pos (counts)
Axis 1 Comm Pos (counts)
Time (millisec)
Time (millisec)
Tuning-Related Commands
(see
6000 Series Software Reference or the Servo Tuner User Guide for details)
Tuning Gains:
SGP
..............
Sets the proportional gain in the PIV&F servo algorithm.
SGI
..............
Sets the integral gain in the PIV&F servo algorithm.
SGV
..............
Sets the velocity gain in the PIV&F servo algorithm.
SGAF
............
Sets the acceleration feedforward gain in the PIV&F
a
algorithm.
SGVF
............
Sets the velocity feedforward gain in the PIV&F
v
algorithm.
SGILIM
.......
Sets a limit on the correctional control signal that results from the integral
gain action trying to compensate for a position error that persists too long.
SGENB
.........
Enables a previously-saved set of PIV&F gains. A set of gains (specific to
the current feedback source selected with the
SFB
command) is saved
using the
SGSET
command.
SGSET
.........
Saves the presently-defined set of PIV&F gains as a
gain set (specific to the
current feedback source on each axis). Up to 5 gain sets can be saved and
enabled at any point in a move profile, allowing different gains at different
points in the profile.
Servo Performance:
INDAX
.........
Selects the number of available axes to use.
SSFR
............
Sets the ratio between the update rate of the move trajectory and the update
rate of the servo action. Affects the
servo sampling update, the motion
trajectory update, and the system update.
Feedback Setup:
SFB
...............
Selects the servo feedback device.
Options are: encoder or ANI input.
IMPORTANT: Parameters for scaling,
tuning gains, max. position error (
SMPER
),
and position offset (
PSET
) are specific to
the feedback device selected (with the
SFB
command) at the time the
parameters are entered.
ERES
............
Encoder
resolution.
SMPER
..........
Sets the maximum allowable error
between the commanded position and the
actual position as measured by the
feedback device (encoder or ANI input).
If the error exceeds this limit, the
controller activates the Shutdown output
and sets the DAC output to zero (plus any
SOFFS
offset). If there is no offset, the
motor will freewheel to a stop. You can
enable the
ERROR
command to continually
check for this error condition
(
ERROR.12-1
), and when it occurs to
branch to a programmed response defined
in the
ERRORP
program.