Changes from last revision, Change summary, Oem6250 – Parker Hannifin SERVO CONTROLLER OEM6250 User Manual
Page 3
Change Summary
OEM6250 Installation Guide
R e v B
March 1998
The following is a summary of the primary technical changes to this document.
This book, p/n 88-016524-01B, supersedes 88-016524-01A.
T o p i c
D e s c r i p t i o n
Error Correction:
DFT Input Circuit
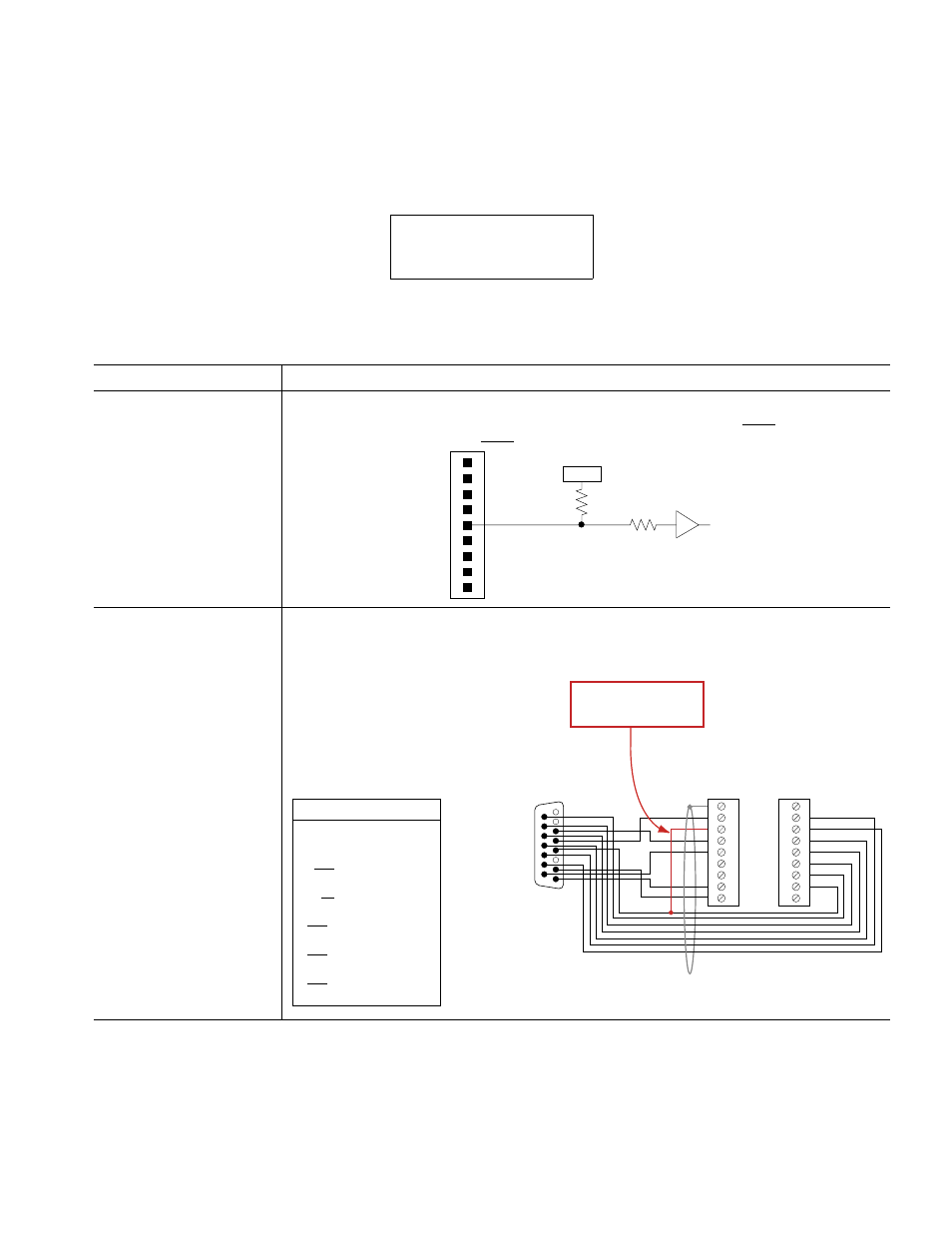
Revision A incorrectly stated that the drive fault input (DFT pin on the DRIVE connectors)
shared the same circuit design as the limit inputs and trigger inputs. DFT is not controlled by
the AUX-P pullup terminal and is not affected by the R45 resistor. The DFT input circuit is:
6.8 K
W
SHLD
COM
SHTNC
SHTNO
DFT
AGND
RSVD
CMD–
CMD+
47 K
W
74HCxx
+5VDC
Clarification:
BD-E Drive Connections
With a BD-E drive connected as illustrated in revision A, the motor has a tendency to lunge for
several revolutions at full torque when power is removed simultaneously from the OEM6250 and
the BD-E drive (as would be the case in a power outage). The correction is to connect the
OEM6250’s SHTNC terminal to the BD-E’s GND terminal (pin 4).
OEM6250
BD-E Drive
User I/O Connector
NOTE: These connections will work only if
BD-E jumper LK2 is set to position B
(not the factory default position).
BD-E Drive
V2 (pin 1)
V1 (pin 2)
GND (pin 4)
RST (pin 5)
+15V (pin 6)
FT (pin 9)
AOP (pin 10)
AOP (pin 11)
BOP (pin 12)
BOP (pin 13)
ZOP (pin 14)
ZOP (pin 15)
«
«
«
«
«
«
«
«
«
«
«
«
OEM6250
CMD–
CMD+
GND
COM
SHTNO
DFT
A–
A+
B+
B–
Z+
Z–
1
8
15
SHLD
COM
SHTNC
SHTNO
DFT
AGND
RSVD
CMDÐ
CMD+
DRIVE 1
ENCODER 1
+5V
A+
AÐ
B+
BÐ
Z+
ZÐ
GND
SHLD
9
Added connection
to prevent lunge.