ADLINK PCI-8258 User Manual
Page 90
76
Motion Control Theory
b Integral Control
Integral control can reduce Steady-state error and suppress noise
at the expense of system Response time.
c Derivative Control
The derivative control improves Temporary response time and
relative steadiness but helps little in reducing noise and steady
state error.
d PI-Control
In terms of frequency domain, the PI controller increases system
low frequency range for reduced steady state error at the expense
of poorer system response speed caused by phase lag.
e PD-Control
In addition, phases of increased high frequency range may speed
up system responses of PD controller. However, this may lead to
more Noise impact as a result of high frequency gain.
f PID-Control
A PID controller is a PI and PD combined controller. The PID
controller combines advantages of both PI and PD controllers to
improve steady state error without sacrificing system response
speed.
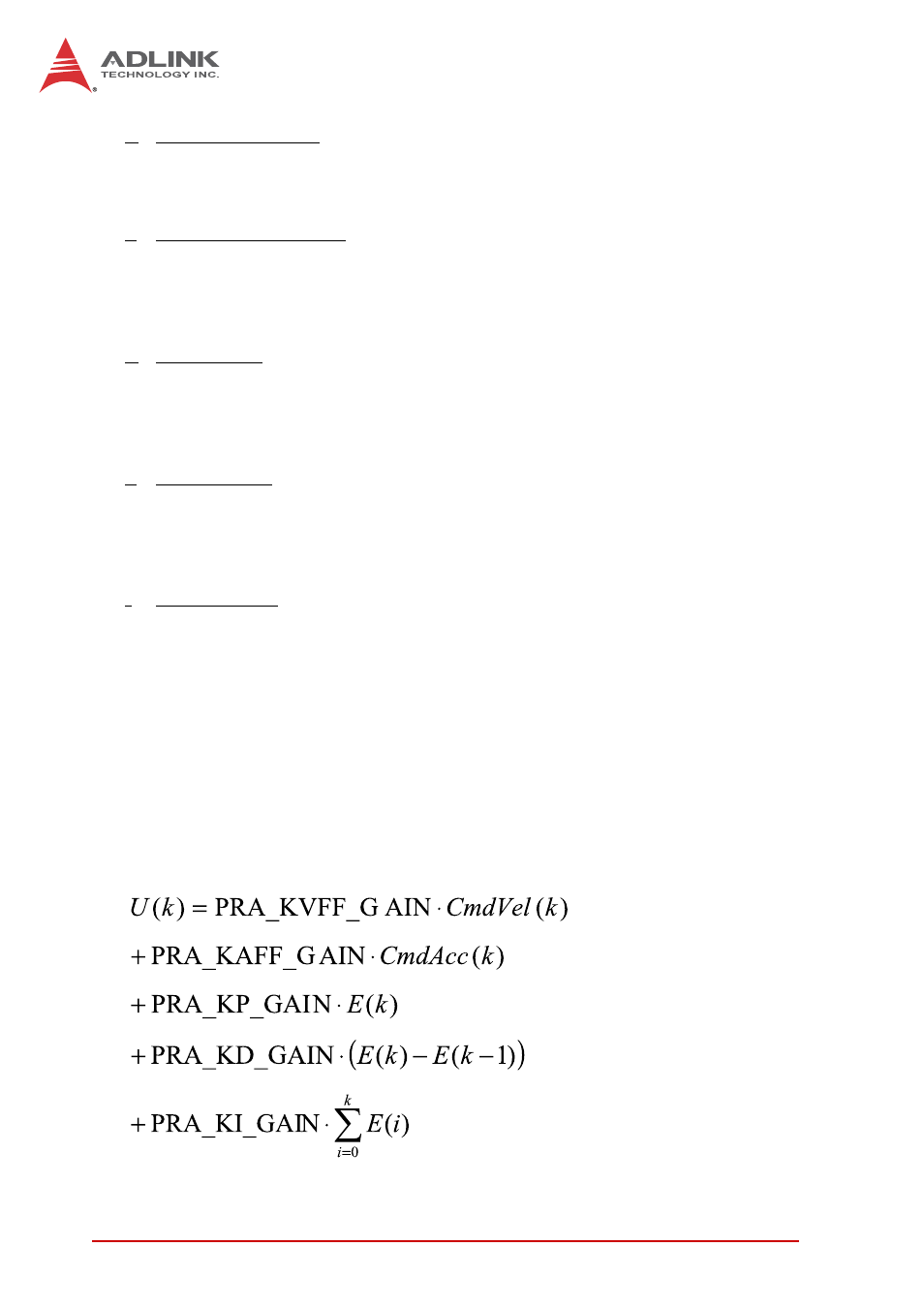
See Figure 4-4 of the close loop control system structure of this
controller, see Table 1 for descriptions on all the close loop control
relevant axis parameters. For actual application, the controller
must realize the transformation, reference to above descriptions,
from continuous time standard pattern to discrete time pattern as
described in mathematical equation illustrated below