ADLINK PCI-8258 User Manual
Page 159
Motion Control Theory
145
PCI-8254 / PCI-8258
All helical interpolation input methods described above requires
giving normal vector. If there is error with the normal vector, the
controller corrects it automatically. See Section 4.8.2 Arc
interpolation for correction method.
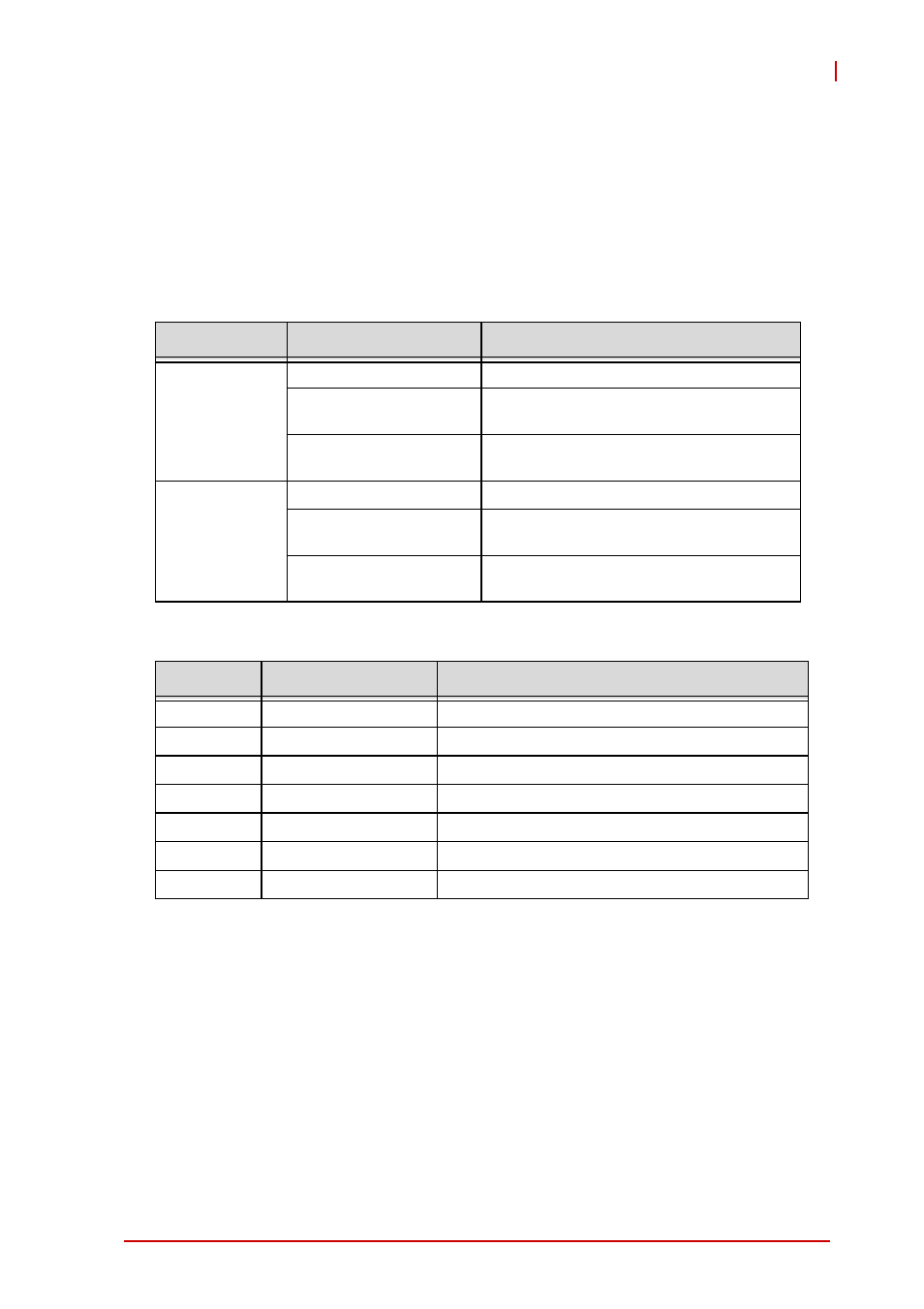
Relevant APS API described below:
Relevant axis parameters
Input method
API
Description
Method 1
Center-Angle
I32 APS_sprial_ca ();
Start up 3D helical interpolation
I32 APS_sprial_ca_v ();
Start up 3D helical interpolation + maximum
velocity parameter
I32 APS_sprial_ca_all ();
Start up 3D helical interpolation + all velocity
parameter setup
Method 2
Center-End
I32 APS_sprial_ce ();
Start up 3D helical interpolation
I32 APS_sprial_ce_v ();
Start up 3D helical interpolation + maximum
velocity parameter
I32 APS_sprial_ce_all ();
Start up 3D helical interpolation + all velocity
parameter setup
Param. No.
Define symbol
Description
07h (7)
PRA_SD_DEC
stop_move (), deceleration rate
20h (32)
PRA_SF
S-factor
21h (33)
PRA_ACC
Acceleration rate
22h (34)
PRA_DEC
Deceleration rate
23h (35)
PRA_VS
Start velocity
24h (36)
PRA_VM
Maximum velocity
25h (37)
PRA_VE
End velocity