Figure 4-65, Adjust electronic gear's auto engagement speed, 2 gantry mode – ADLINK PCI-8258 User Manual
Page 177
Motion Control Theory
163
PCI-8254 / PCI-8258
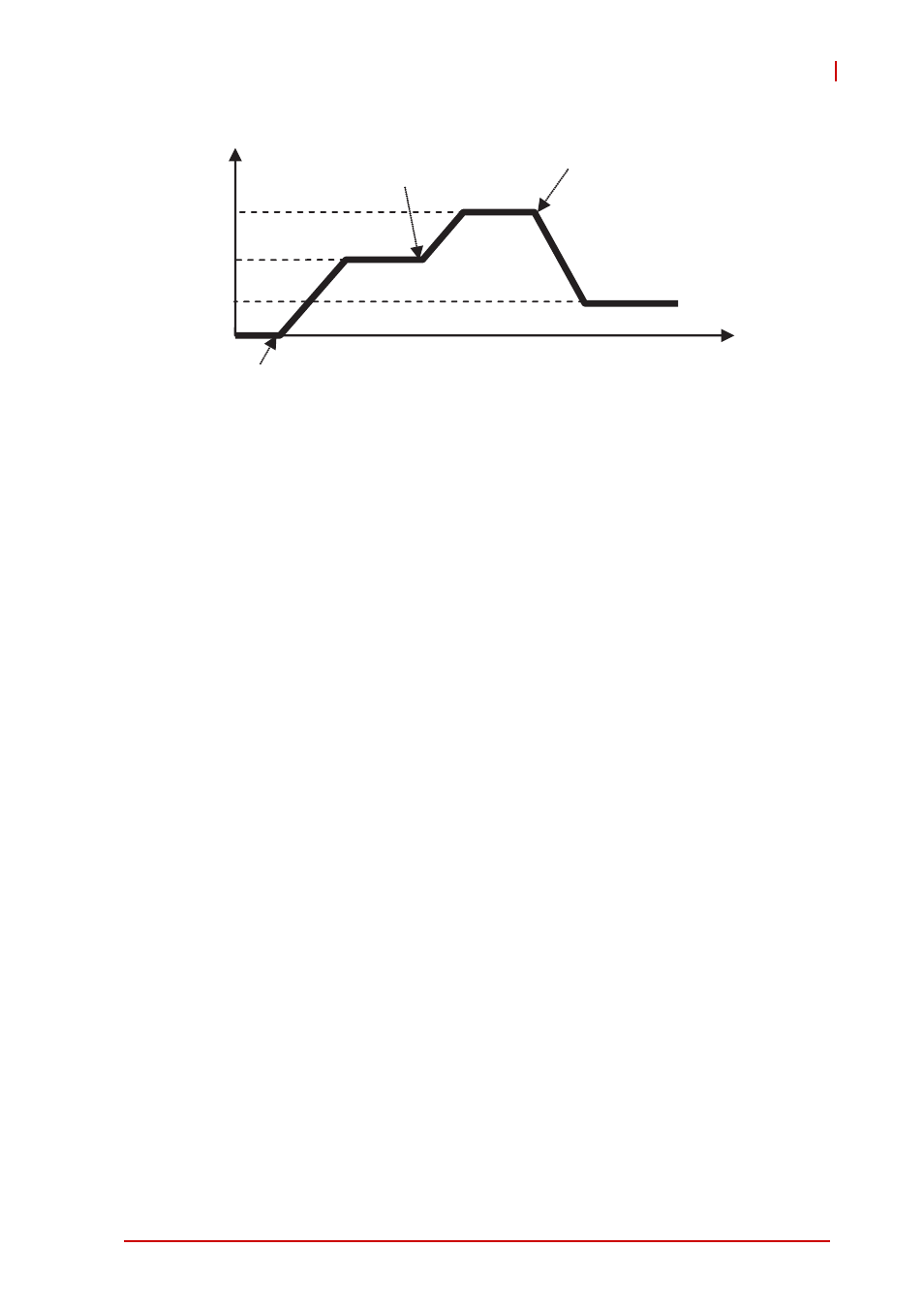
Figure 4-65: Adjust electronic gear's auto engagement speed
There are several conditions that may relieve gear relations in
standard mode:
1. Relieve gear relation by APS_start_gear () manually
2. If the EMG / ALM / PEL / MEL / ALM signal of slave axis
turns ON, the master axis is not affected if it is moving.
3. When slave axis received stop (), emg_stop (), and
servo_off () commands
4.10.1.2
Gantry Mode
The dual drives gantry mechanism features the following:
1. Gear relation remains unless manually relieved by
users.
2. Master axis stops when EMG / ALM / PEL / MEL / ALM
signal of slave axis is set to ON.
3. Master and slave axes stop when stop (), emg_stop (),
and servo_off () commands received by the slave axis.
4. Gear ration is fixed at 1:1 and cannot be changed.
5. Settings of engage rate are ignored.
In addition, this mode features a protection mechanism against
two levels of mis-position errors. The controller checks position
errors of both axes at every movement cycle for exceeding error
setup. If error value is greater than position error settings of level
1, it starts the deceleration stop. If error value is greater than the
Change gear ratio to ratio-3
Change gear ratio to ratio-2
Time
Start gearing A
Ratio
Ratio 2
Ratio 1
Ratio 3