2 how to use, 94 motion control theory – ADLINK PCI-8258 User Manual
Page 108
94
Motion Control Theory
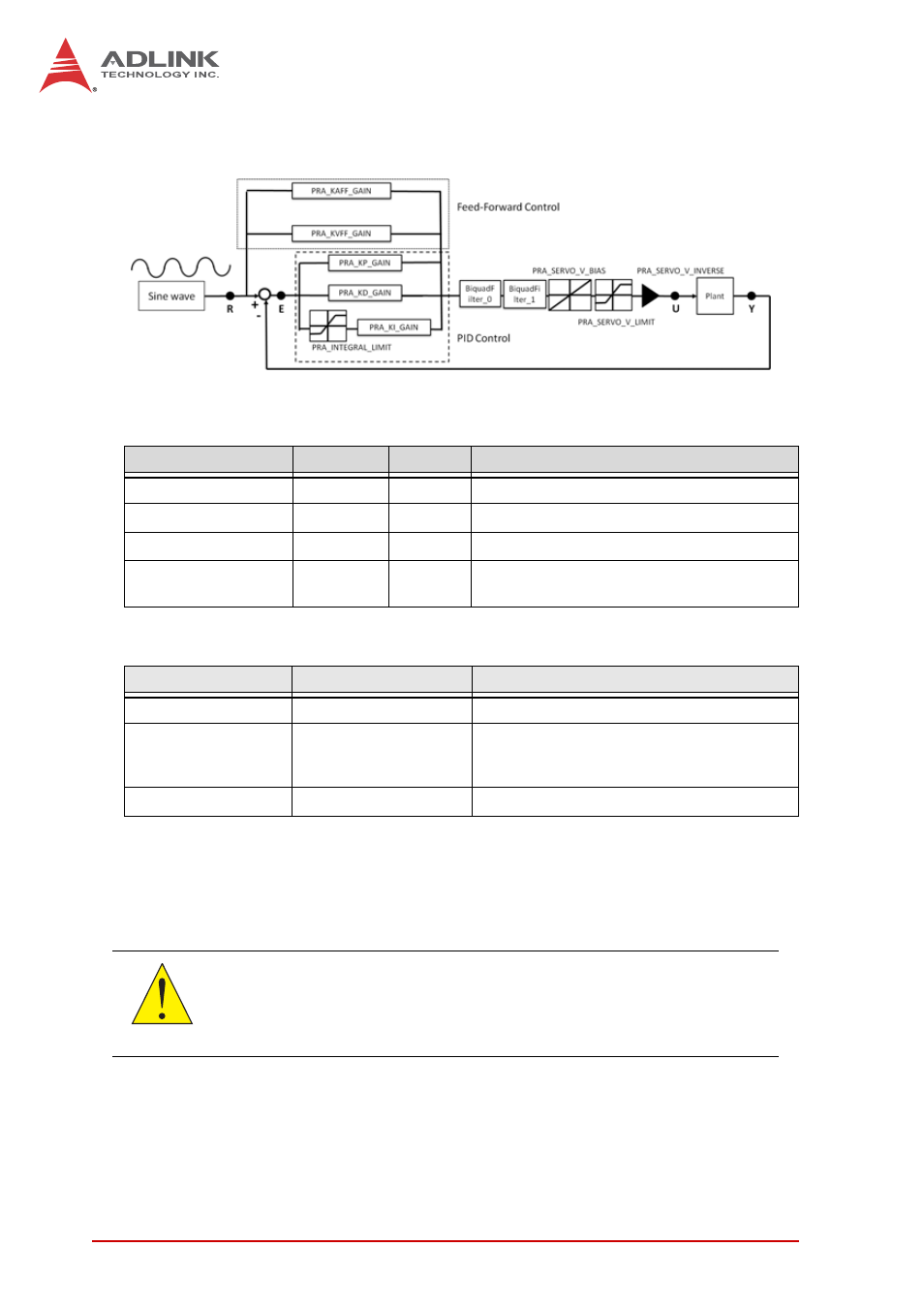
Frequency response structure diagram
Signal description table
Frequency response type table
4.2.5.2
How to Use
Usage and precautions are illustrated below. See Bode plot
relevant parameter table for some of the settings:
Name
Symbol
Unit
Description
Sine wave
R
pulse
The input of closed-loop system.
Error position
E
pulse
The input of open-loop system.
Controller output
U
pulse
The input of plant.
Encoder
Y
pulse
The output of closed-loop system, open-loop
system, and plant.
Type
Transfer function T
Description
Plant
T = Y/U
It includes servo motor system
Open-loop
T = Y/E
It includes PID controller and servo motor
system (Assume feed-forward controller is
disable and bypass Biquad filters)
Closed-loop
T = Y/R
Total system
CAUTION
Set up your controller by manual or auto tuning before calculating
the system frequency response as invalid setup in a fully-closed
circuit may lead to jerking servo motor.