188 motion control theory – ADLINK PCI-8258 User Manual
Page 202
188
Motion Control Theory
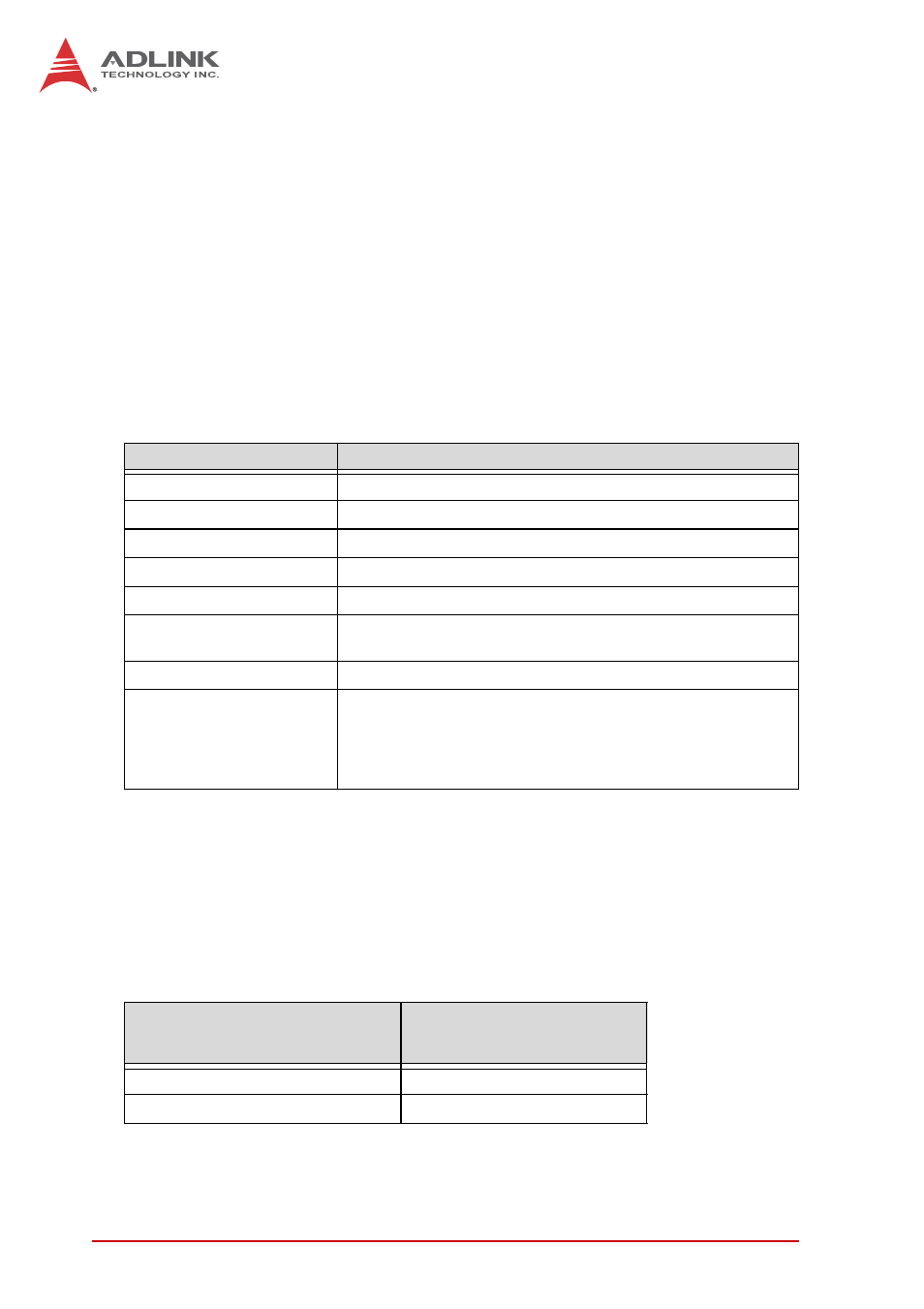
a. Movement parameter setup
Please set up movement parameters before executing movement
commands including absolute and relative movement, maximum,
ending velocity, acceleration and deceleration, S-factor and speed
blending method between adjacent paths, for speed and path
planning applicable to applications. Please note that these
parameter settings are kept by the program memory once being
set up. Existing settings may be applied to other movement
commands automatically. Repetitive setups are not required for
each movement command unless you want to change parameter
settings.
b. Instruction command setup
The instruction command is executed simultaneously with the
point table's movement one. That is, it may control digital outputs
concurrently at different movement section during motion
execution.
Movement parameter setup Paired APS function
Absolute / relative movement APS_pt_set_absolute / APS_pt_set_relative
Maximum speed
APS_pt_set_vm
Ending speed
APS_pt_set_ve
Acceleration
APS_pt_set_acc
Deceleration
APS_pt_set_dec
Acceleration and
deceleration
APS_pt_set_acc_dec
S-factor
APS_pt_set_s
Speed blending between
adjacent paths
Please refer to Section
4.11.3.
APS_pt_set_trans_buffered (buffer)
APS_pt_set_trans_inp (buffered in-place)
APS_pt_set_trans_blend_dec (blend - deceleration)
APS_pt_set_trans_blend_dist (blend - residue-distance)
APS_pt_set_trans_blend_pcnt (blend - residue-distance ratio)
Instruction command (executed
along with the movement
command)
Paired APS function
Digital output (DO)
APS_pt_ext_set_do_ch
VAO table switch
APS_pt_ext_set_table_no