Figure 4-8, Ideal low pass filter, 1 low pass filter – ADLINK PCI-8258 User Manual
Page 101: Pass band stop band
Motion Control Theory
87
PCI-8254 / PCI-8258
4.2.4.1
Low Pass Filter
Increase control gains (KP and KD) is commonly adopted approach in
improving response speed and accuracy. However, control gains
come with high frequency vibration noise especially when mechanic
(motor) stops operations. Low pass filter can be used here to
eliminate high frequency vibration noise in case like this.
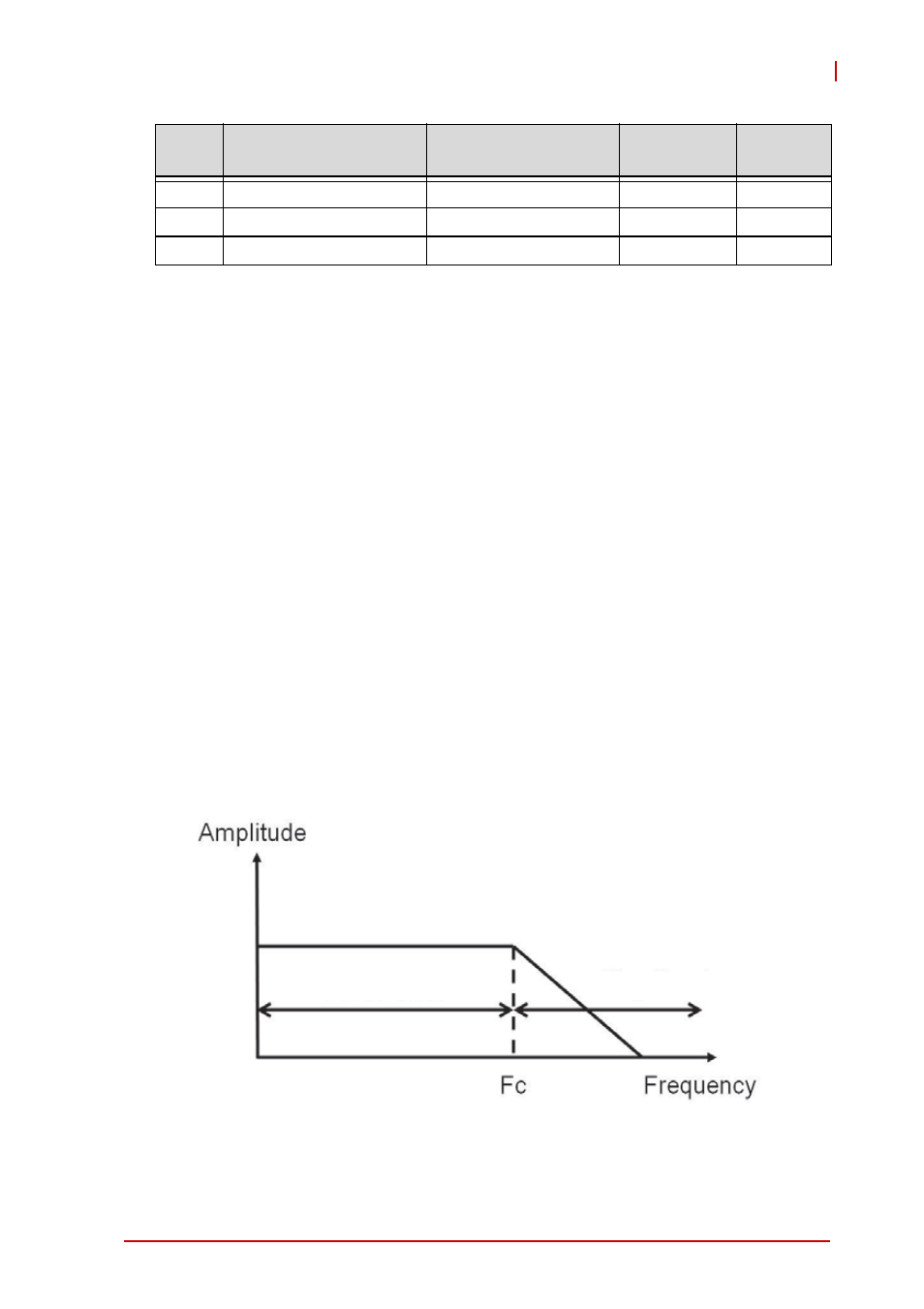
See Figure below for an ideal low pass filter. Here the Fc is the Cutoff
frequency, the frequency range that can be passed is called the Pass
band, and the frequency range to be attenuated is the Stop band.
Signal frequency lower than the cutoff frequency can pass freely yet
signal with frequency greater than cutoff frequency will be attenuated.
Let's explain this effect with one example. Assume a low pass filter
with 1000 Hz cutoff frequency, 100 microseconds sampling time,
and derived coefficients A1 at 32767, A2 at -11896, B0 at 1794, B1
at 3588, B2 at 1794, and DIV at 28046. See Figure below for
simulation results from sine curves at different frequency. This
figure indicates that when input signal is a 30Hz sine curve it
passes the filter with amplitude and phase remains intact. for input
of 1200Hz sine curve the amplitude is attenuated and the phase
delayed. The high frequency noise is then illuminated.
Figure 4-8: Ideal low pass filter
13Bh
PRA_BIQUAD1_B1
Biquad filter 1 coefficient
-32768~32767
0
13Ch
PRA_BIQUAD1_B2
Biquad filter 1 coefficient
-32768~32767
0
13Dh
PRA_BIQUAD1_DIV
Biquad filter 1 coefficient
-32768~32767
1
Param.
No.
Define symbol
Description
Value
Default
Pass band
Stop band