Table 4-6, Closed circuit control signal table – ADLINK PCI-8258 User Manual
Page 194
180
Motion Control Theory
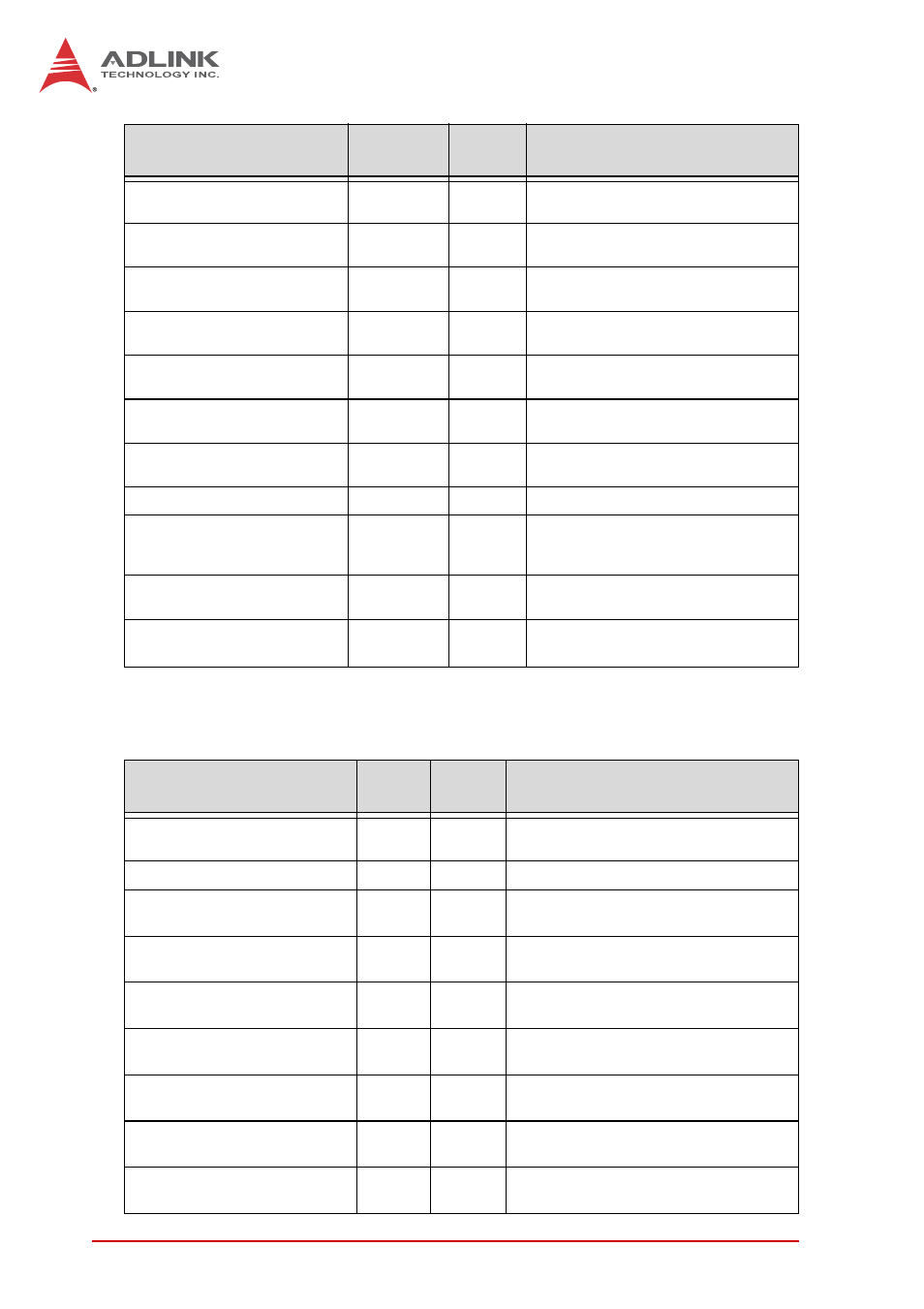
Table 4-6: Closed circuit control signal table
SAMP_SRC_FBK_POS_F64
Axis 0~7
Double
Same as SAMP_SRC_FBK_POS but
presented in float point numbers
SAMP_SRC_CMD_VEL_F64
Axis 0~7
Double
Same as SAMP_SRC_CMD_VEL but
presented in float point numbers
SAMP_SRC_FBK_VEL_F64
Axis 0~7
Double
Same as SAMP_SRC_FBK_VEL but
presented in float point numbers
SAMP_SRC_CONTROL_VOL_F64
Axis 0~7
Double
Same as SAMP_SRC_CONTROL_VOL
but presented in float point numbers
SAMP_SRC_ERR_POS_F64
Axis 0~7
Double
Same as SAMP_SRC_FBK_POS but
presented in float point numbers
SAMP_PWM_FREQUENCY_F64
Channel 0~3
Double
PWM frequency;
Unit: Hz
SAMP_PWM_DUTY_CYCLE_F64
Channel 0~3
Double
PWM duty cycle;
Unit: %
SAMP_PWM_WIDTH_F64
Channel 0~3
Double
PWM width; Unit : ns
SAMP_VAO_COMP_VEL_F64
No. 0~1
Double
Composed velocity for Laser power
control;
Unit: pulse/sec
SAMP_PTBUFF_COMP_VEL_F64
Table 0~1
Double
Composed velocity of point table; Unit:
pulse/sec
SAMP_PTBUFF_COMP_ACC_F64
Table 0~1
Double
Composed acceleration of point table);
Unit: pulse/sec
2
Signal name
Range
Data
type
Descriptions
PID_CMD_POS_COUNT
Axis 0~7 Integer
Position command;
Unit: pulse
PID_CMD_ACC_COUNT
Axis 0~7 Integer
Acceleration command; Unit: pulse
PID_CMD_VEL_COUNT
Axis 0~7 Integer
Velocity command;
Unit: pulse
PID_ERR_POS_COUNT
Axis 0~7 Integer
Position error;
Unit: pulse
PID_KP_CALC_COUNT
Axis 0~7 Integer
Proportional control output;
Unit: pulse
PID_KI_CALC_COUNT
Axis 0~7 Integer
Integration control output;
Unit: pulse
PID_KD_CALC_COUNT
Axis 0~7 Integer
Derivative control output;
Unit: pulse
PID_KAFF_CALC_COUNT
Axis 0~7 Integer
Acceleration feedforward control output;
Unit: pulse
PID_KVFF_CALC_COUNT
Axis 0~7 Integer
Velocity feedforward control output;
Unit: pulse
Signal name
Range
Data
type
Descriptions