ADLINK PCI-8258 User Manual
Page 127
Motion Control Theory
113
PCI-8254 / PCI-8258
ORG signal of most mechanical device has two directional edges (the
two ends of signal fender). Figure above indicates that when the
homing direction parameter in axis parameters is set to positive
direction (PRA_HOME_DIR), the control axis starts searching from
positive direction (the ascending direction of position command). And
stops at the left edge of ORG signal (close to MEL mechanical
signal).
On the contrary, if the homing direction parameter in axis parameters
is set to negative direction (PRA_HOME_DIR), the control axis starts
searching from negative direction (the descending direction of
position command). And stops at the right edge of ORG signal (close
to PEL mechanical signal). Figure below indicates home movement
when ”PRA_DIR” is set to negative direction
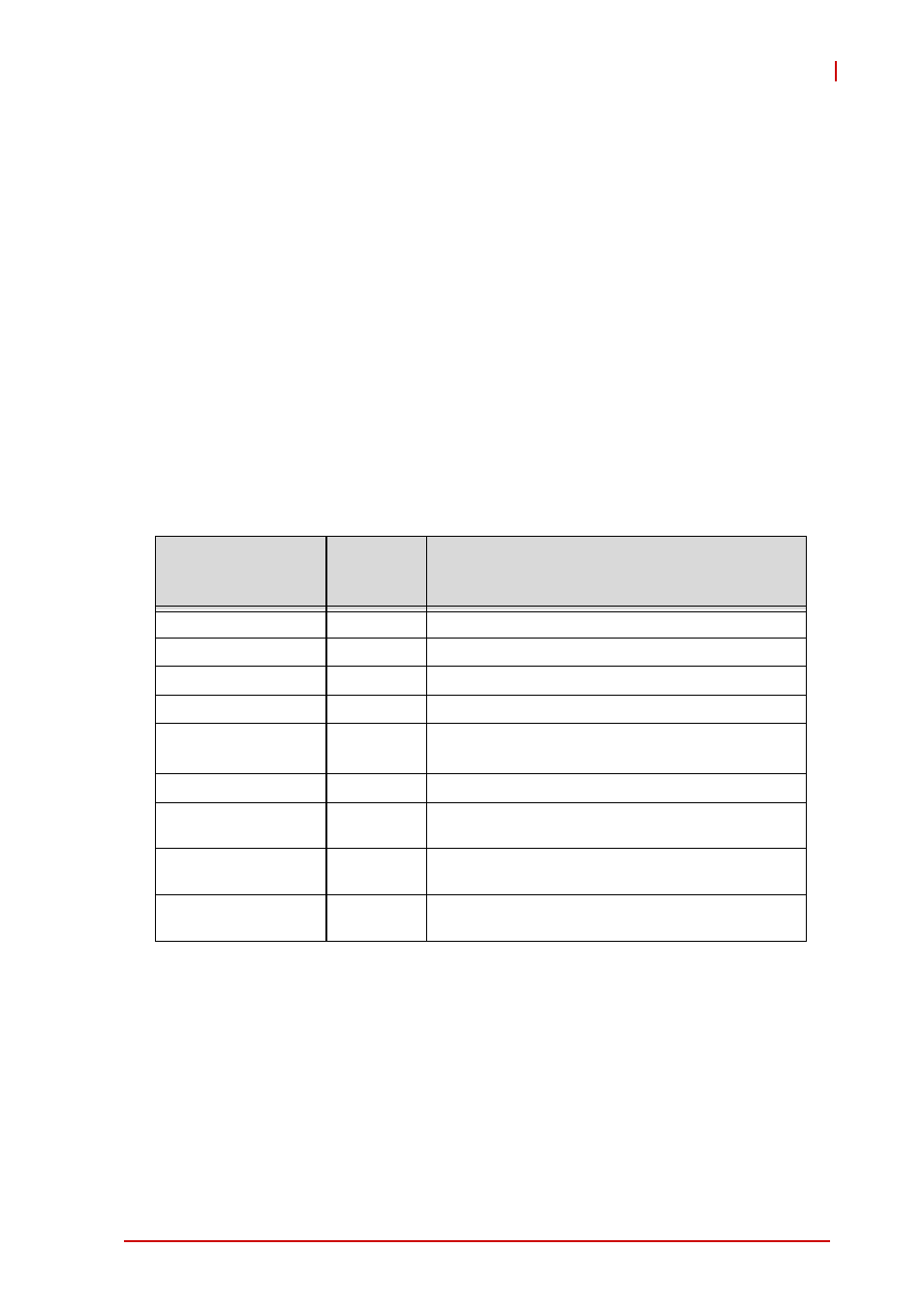
• Relevant axis parameters setup
Axis parameters
Axis
parameter
values
Description to axis parameter value
PRA_HOME_MODE
0
Employing home mode 0 (homing by ORG signal)
PRA_HOME_DIR
1
By negative direction forward homing
PRA_HOME_EZA
0
Further align with signal EZ, 0: No, 1: Yes
PRA_HOME_S
0
S-curve factor
PRA_HOME_ACC
ACC
Acceleration and deceleration in unit of (distance unit
of measure/sec.
2
)
PRA_HOME_VS
VS
Initial speed in unit of (distance unit of measure/sec.)
PRA_HOME_VM
VM
Speed of original position searching in unit of
(distance unit of measure/sec.)
PRA_HOME_VO
VO
Homing speed in unit of (distance unit of
measure/sec.)
PRA_HOME_SHIFT
0
Shift amount of homing position (distance unit of
measure / pulse)