ADLINK PCI-8258 User Manual
Page 168
154
Motion Control Theory
Motion status is described below in sequence of bit:
Bit0~ bit4:
CSTP (Command stop): When this signal is ON, the controller
is not sending movement command.
VM: when this signal is ON, the movement reached its
maximum velocity settings.
ACC: when this signal is ON, the movement is accelerating.
DEC: when this signal is ON, the movement is decelerating.
DIR: when this signal is ON, the movement is moving at
positive direction. When movement stops, the DIR saves status
right before movement stopped.
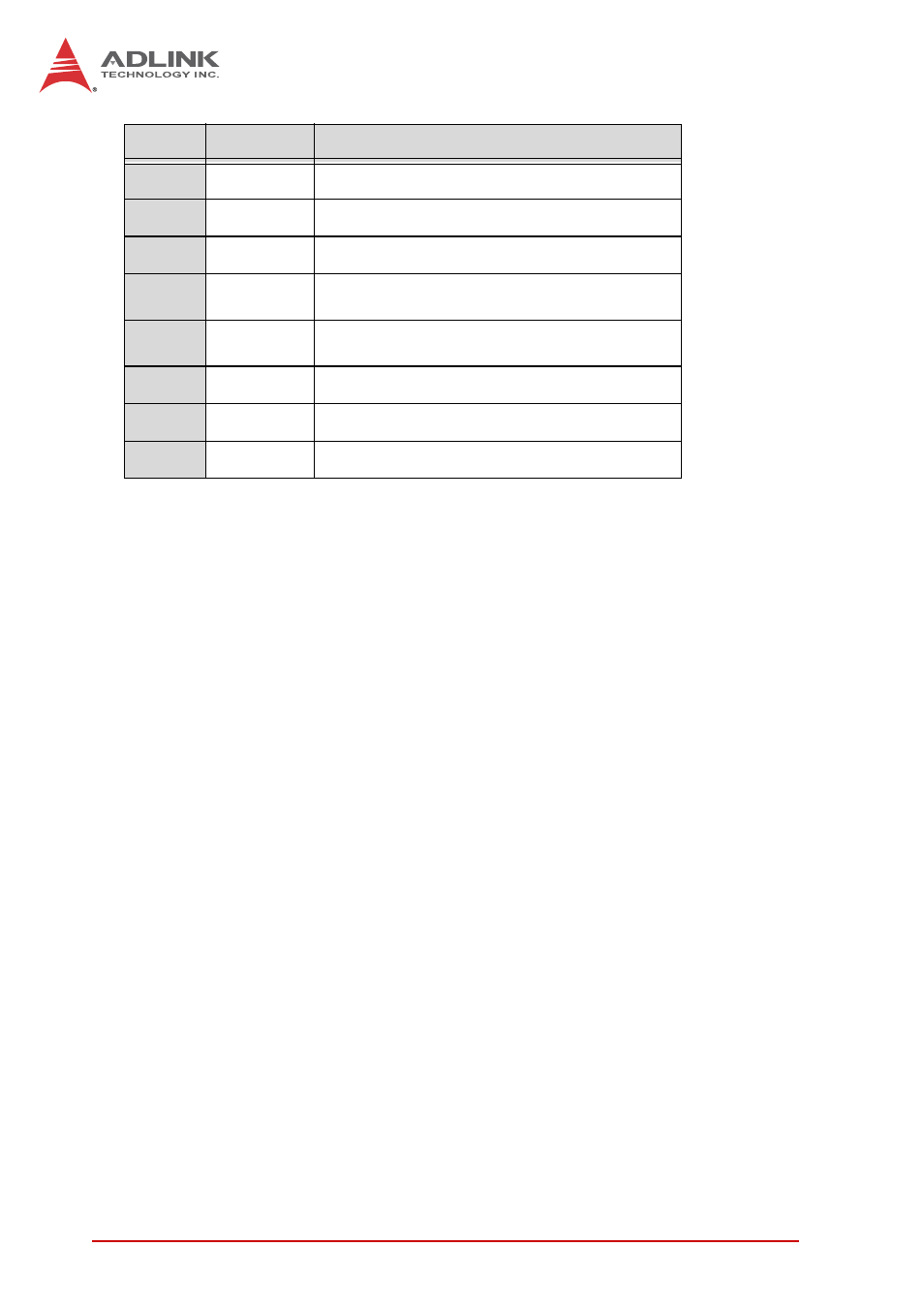
15
JOG
Jog movement in progress
16
ASTP
Clear this signal after next movement is executed
17
BLD
The axis is running blending movement
18
PRED
Pre-offset event, clear this signal after next
movement is executed
19
POSTD
Post-offset event, clear this signal after next
movement is executed
20~27
(Reserved)
28
GER
In geared, the axis is a slave one
29~31
(Reserved)
Bit No.
Define
Description