3 motion control operations, 1 coordinated system, Motion control operations – ADLINK PCI-8258 User Manual
Page 112: Coordinated system, Figure 4-16, Controller coordinates system block
98
Motion Control Theory
4.3 Motion Control Operations
This section describes motion control modes provided by the
controller and their operation principle. The objective is to help
users make most of the motion control capacity of your controller
to accomplish desired applications.
4.3.1
Coordinated System
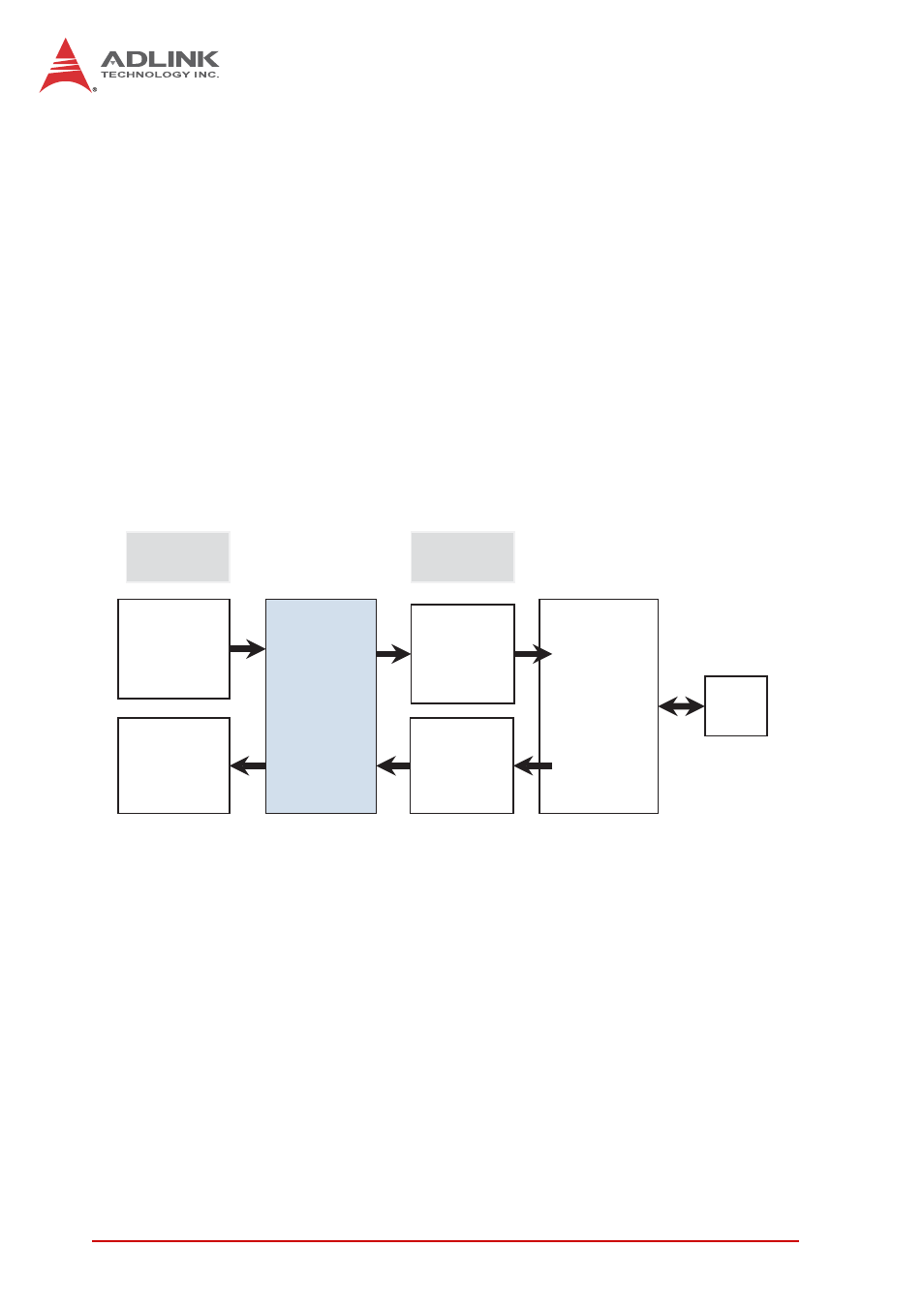
This controller employs Cartesian coordinate system where one or
more axes motion can be executed by one-to-one mapping each
axis to a motor. There exists a conversion relation between axis of
the Cartesian coordinate system and the motor being controlled.
This conversion relation enables users to set up their own
coordinate system without restrictions. Figure below indicates a
coordinate system relation. The unit conversion factor will be
reviewed in next section.
Figure 4-16: Controller coordinates system block
You may read out or set up coordinate command location or actual
coordinate location
I32 APS_get_command_f (I32 Axis_ID, F64 *Command);
//command location reading
I32 APS_get_command_f (I32 Axis_ID, F64 *Command);
//command location setup
I32 APS_get_command_f (I32 Axis_ID, F64 *Command);
//actual location reading
I32 APS_get_command_f (I32 Axis_ID, F64 *Command);
//actual location setup
I32 coordinate format compliant API functions the same as API
described above
Coordinated
System
Motor
coordinates
Command
Position(F64)
Feedback
Position(F64)
Command
counter (I32)
Encoder
counter (I32)
Motor
Servo loop
control
/
Pulse
generator
(unit
factor)