Figure 4-2, Illustration of analog command output, 3 analog type – ADLINK PCI-8258 User Manual
Page 82
68
Motion Control Theory
4.1.1.3
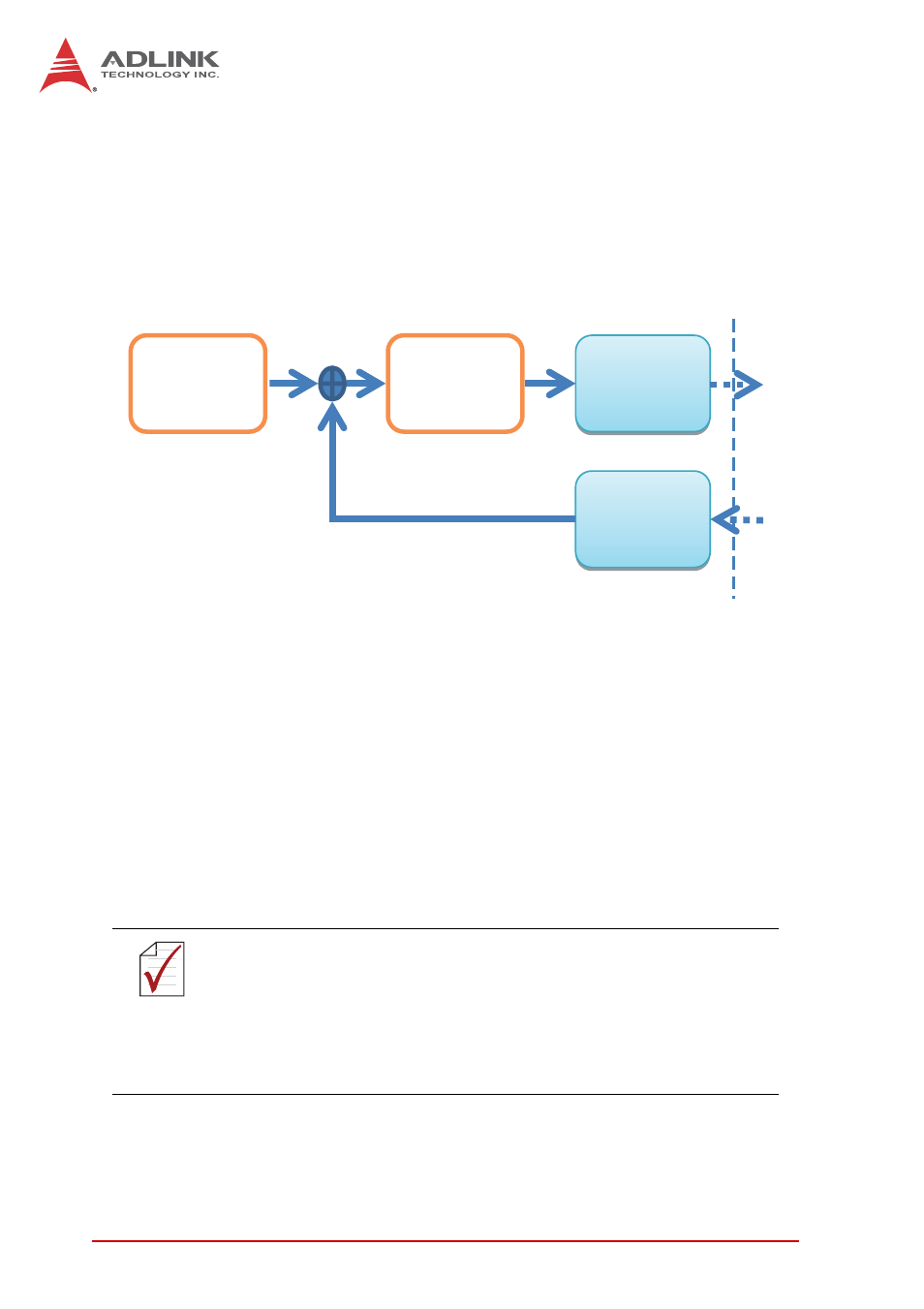
Analog Type
The analog control mode is used to control servo motor in velocity
mode or torque mode that accepts signals in analog voltage.
In this mode the closed-loop function will be initiated automatically.
See figure below for closed-loop illustration. See Chapter 2: Close
loop control for relevant PID close loop function. Adjustments
Figure 4-2: Illustration of analog command output
Set up input/output interface correctly before controlling with close
loop PID controller:
1. Make sure the AOUT voltage control level and logic
ailing with the receiving end of servo motor.
See Section 4.2 Close loop control for its setup.
2. How to set up Decoding method used by the encoder.
Please refer to the Encoder setup in next Section.
NOTE
NOTE
For axis with motion control interface set to analog output its
analog output channle will be controlled by the controller itself
rather than by operators. For axis with motion control interface
set to pulse control interface, its output control is released by
the controller to the users for controlling the analog output
channel by programs.
Command
PID filter
AOUT
Eoncoder