Example – ADLINK AMP-208C User Manual
Page 93
Motion Control Theory
79
AMP-204C / AMP-208C
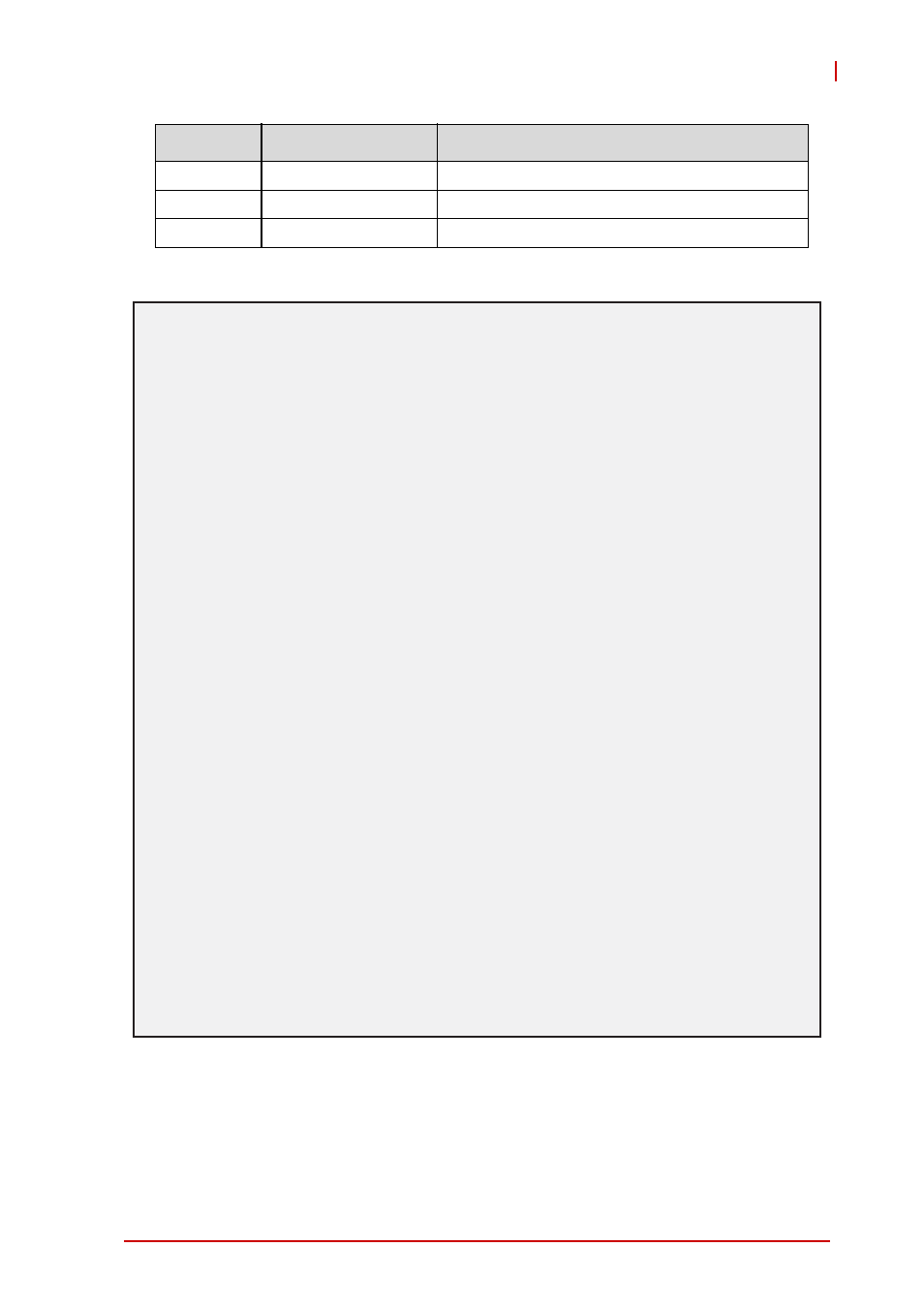
• Example:
18h (24)
PRA_HOME_EZA
EZ alignment enable
19h (25)
PRA_HOME_VO
Homing velocity away from ORG signal
1Bh (27)
PRA_HOME_POS
Position command setup after homing completion
Param. No.
Define symbol
Description
#include
"APS168.h"
#include
"APS_define.h"
#include
"ErrorCodeDef.h"
void
home_move_example()
{
//This example shows how home move operates
I32 axis_id =
0
;
I32 return_code;
I32 msts;
// 1. Select home mode and config home parameters
APS_set_axis_param( axis_id, PRA_HOME_MODE,
0
);
//Set home mode
APS_set_axis_param( axis_id, PRA_HOME_DIR,
1
);
//Set home direction
APS_set_axis_param( axis_id, PRA_HOME_CURVE,
0
);
//
Set acceleration pattern (T-curve)
APS_set_axis_param( axis_id, PRA_HOME_ACC,
1000000
);
// Set homing acceleration rate
APS_set_axis_param( axis_id, PRA_HOME_VM,
100000
);
// Set homing maximum velocity.
APS_set_axis_param( axis_id, PRA_HOME_VO,
50000
);
// Set homing
APS_set_axis_param( axis_id, PRA_HOME_EZA,
0
);
// Set homing
APS_set_axis_param( axis_id, PRA_HOME_SHIFT,
0
);
// Set homing
APS_set_axis_param( axis_id, PRA_HOME_POS,
0
);
// Set homing