1 motion status, Motion status – ADLINK AMP-208C User Manual
Page 137
Motion Control Theory
123
AMP-204C / AMP-208C
4.8.1
Motion Status
Use following API functions to read motion status of each axes:
I32 APS_motion_status ();
Motion status data of individual axis is combined in return
paramter I32 (32 bit integer). See table below for motion status
and meaning represented by each bit:
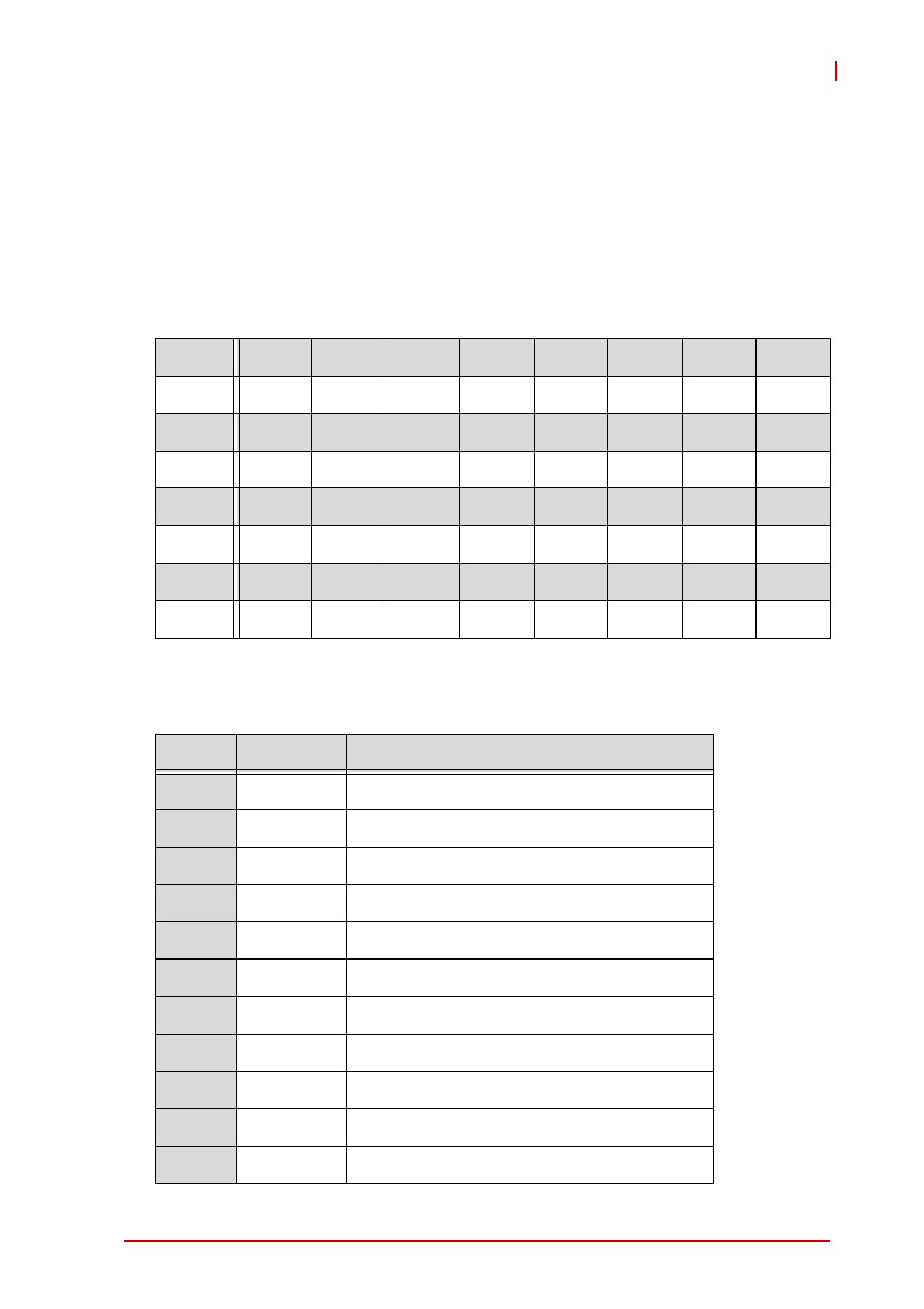
Table below describes meaning of motion status:
Bit No.
7
6
5
4
3
2
1
0
Status
HMV
MDN
DIR
DEC
ACC
VM
CSTP
Bit No.
15
14
13
12
11
10
9
8
Status
JOG
PTB
WAIT
Bit No.
23
22
21
20
19
18
17
16
Status
POSTD
PRED
BLD
ASTP
Bit No.
31
30
29
28
27
26
25
24
Status
GER
Bit No.
Define
Description
0
CSTP
End of single motion command
1
VM
At maximum speed
2
ACC:
Accelerating
3
DEC:
Decelerating
4
DIR:
Motion direction; 1: Positive and 0: Negative
5
MDN
End of motion command
6
HMV
Executing homing movement
7~9
--
(Reserved)
10
WAIT
Waiting for motion trigger
11
PTB
Executing PTB movement
12~14
--
(Reserved)