Figure 4-32, Three dimension spiral interpolation (method 1), 3 helical interpolation – ADLINK AMP-208C User Manual
Page 127
Motion Control Theory
113
AMP-204C / AMP-208C
4.7.2.3
Helical Interpolation
This controller supports 3-dimension helical interpolation (also
known as Spiral–Helix interpolation)
as well as multip input methods to deal with demands of various
applications. See below for its setup:
Method 1: Given center of circle and angle (Center-Angle)
Method 2: Given center of circle and end point (Center-End)
Both methods are described below.
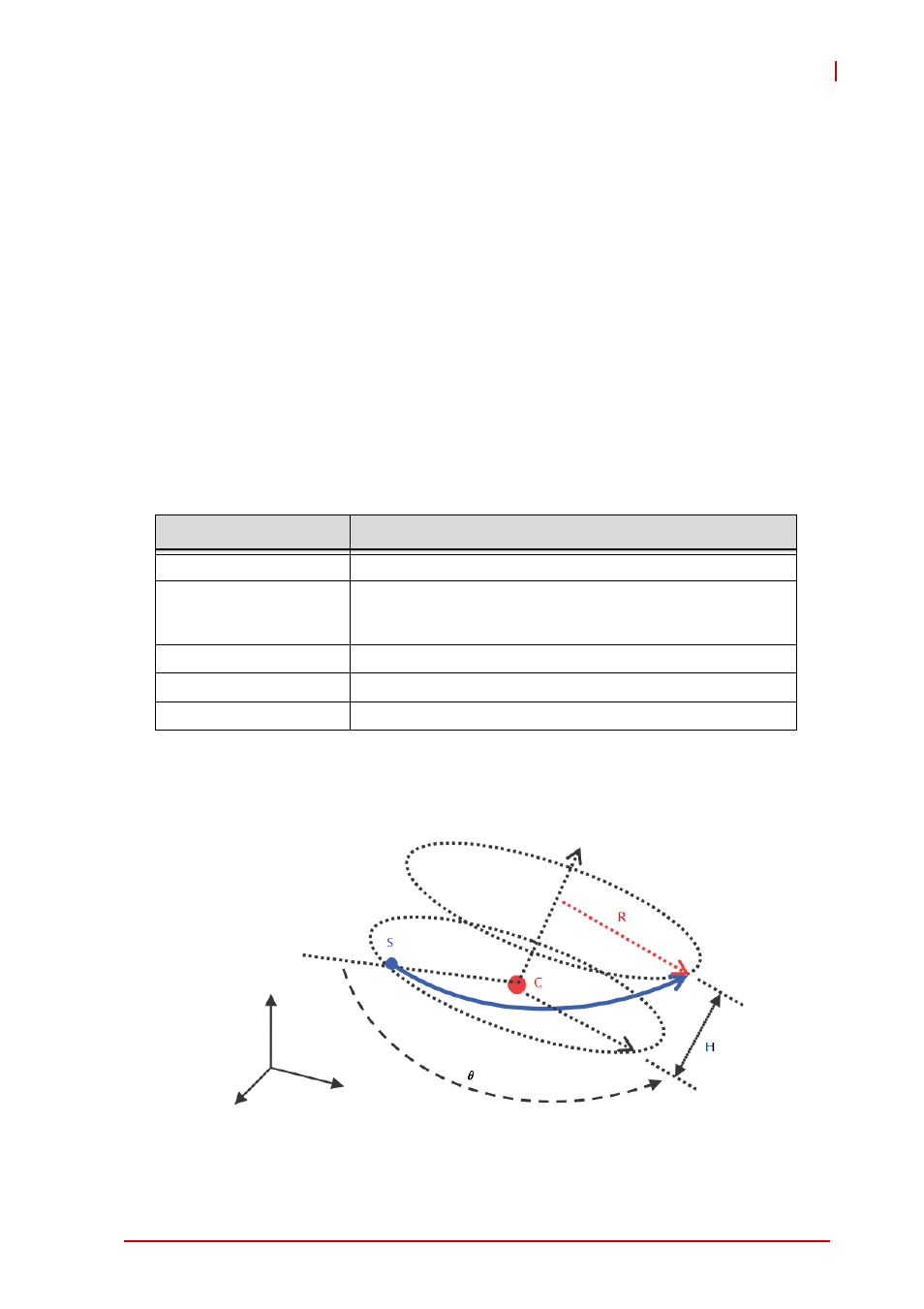
¾ Method 1: Given center of circle and angle (Center-Angle)
See table and figure below for helical curve parameters
• Example:
Figure 4-32: Three dimension spiral interpolation (method 1)
Parameters
Description
Center point
Center of circle (relative or absolute)
Angle
Starting point and ending point angle projected at the circle
plane of starting point (as shown in figure below). Plus and
minus sign indicate directions.
Normal vector
Normal vector of starting point circle plane
Height
Cone height (relative)
Final radius
Radius of circle where the ending point is