ADLINK AMP-208C User Manual
Page 169
Motion Control Theory
155
AMP-204C / AMP-208C
I32 APS_arc3_ca ();I32 APS_arc3_ca_v ();I32 APS_arc3_ca_all
();I32 APS_arc3_ce ();
I32 APS_arc3_ce_v ();I32 APS_arc3_ce_all ();I32 APS_arc3_ca
();I32 APS_arc3_ca_v ();
I32 APS_arc3_ca_all ();I32 APS_sprial_ca ();I32
APS_sprial_ca_v ();I32 APS_sprial_ca_all ();
I32 APS_sprial_ce ();I32 APS_sprial_ce_v ();I32
APS_sprial_ce_all ();
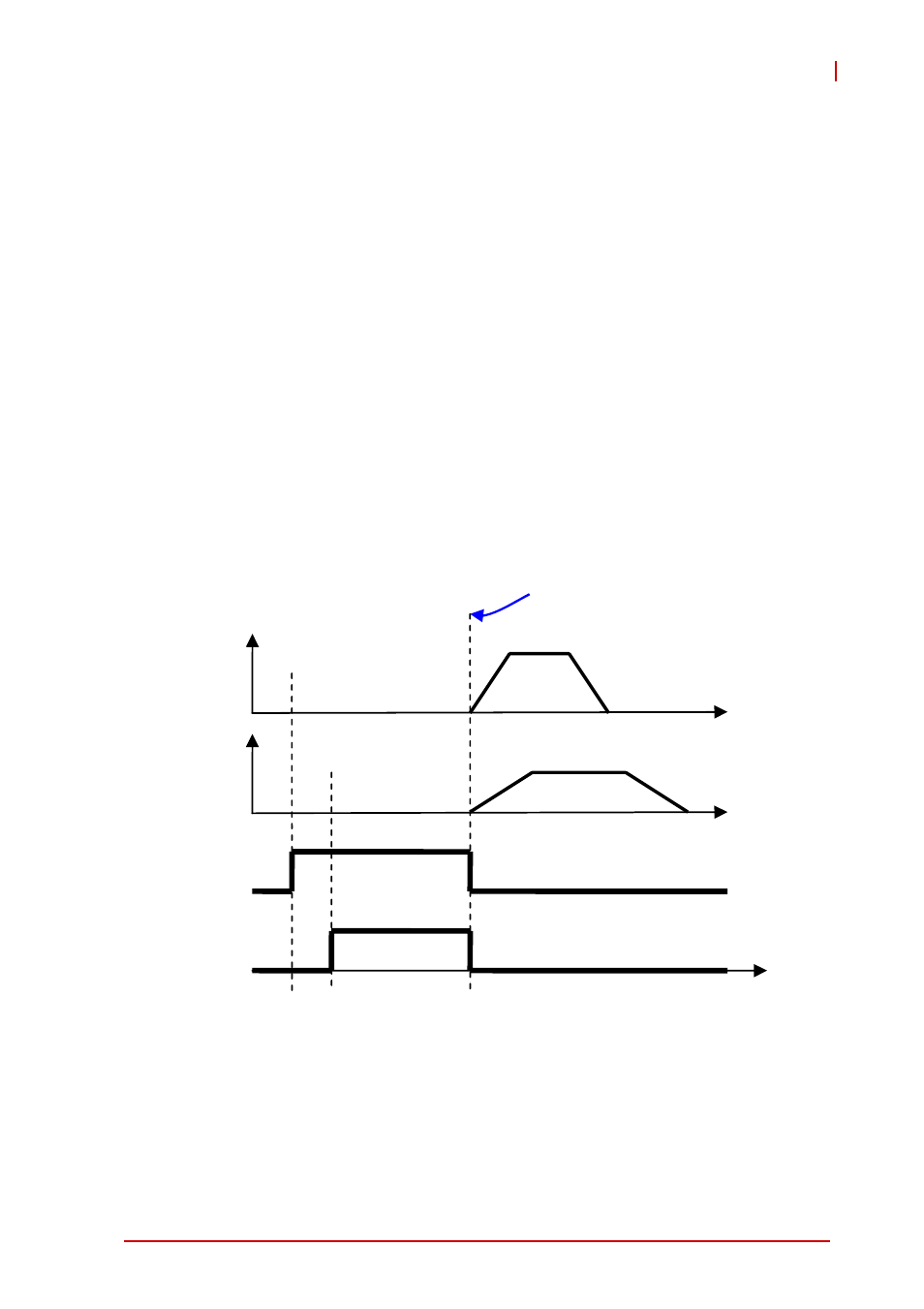
b. Send the trigger signal to run synchronized start
You may enable multiple axes at the same time by sending
trigger with function in form of:
I32 APS_move_trigger ();
See figure below for multiple axes' concurrent startup by trigger:
Relevant APS API described below:
I32 APS_move_trigger ();
// trigger issued
I32 APS_stop_move ();
// synchronized deceleration stoppped
I32 APS_stop_move ();
// synchronized Emg stoppped
Time
Velocity
Time
APS_move_trigger();
Time
Axis
0
Axis
1
APS_ptp(axis0,MF_WAIT );
APS_ptp(axis1,MF_WAIT );
In
WAITstate
In
WAITstate
Axis
0
Axis
1