Figure 4-2, Control cycle – ADLINK AMP-208C User Manual
Page 81
Motion Control Theory
67
AMP-204C / AMP-208C
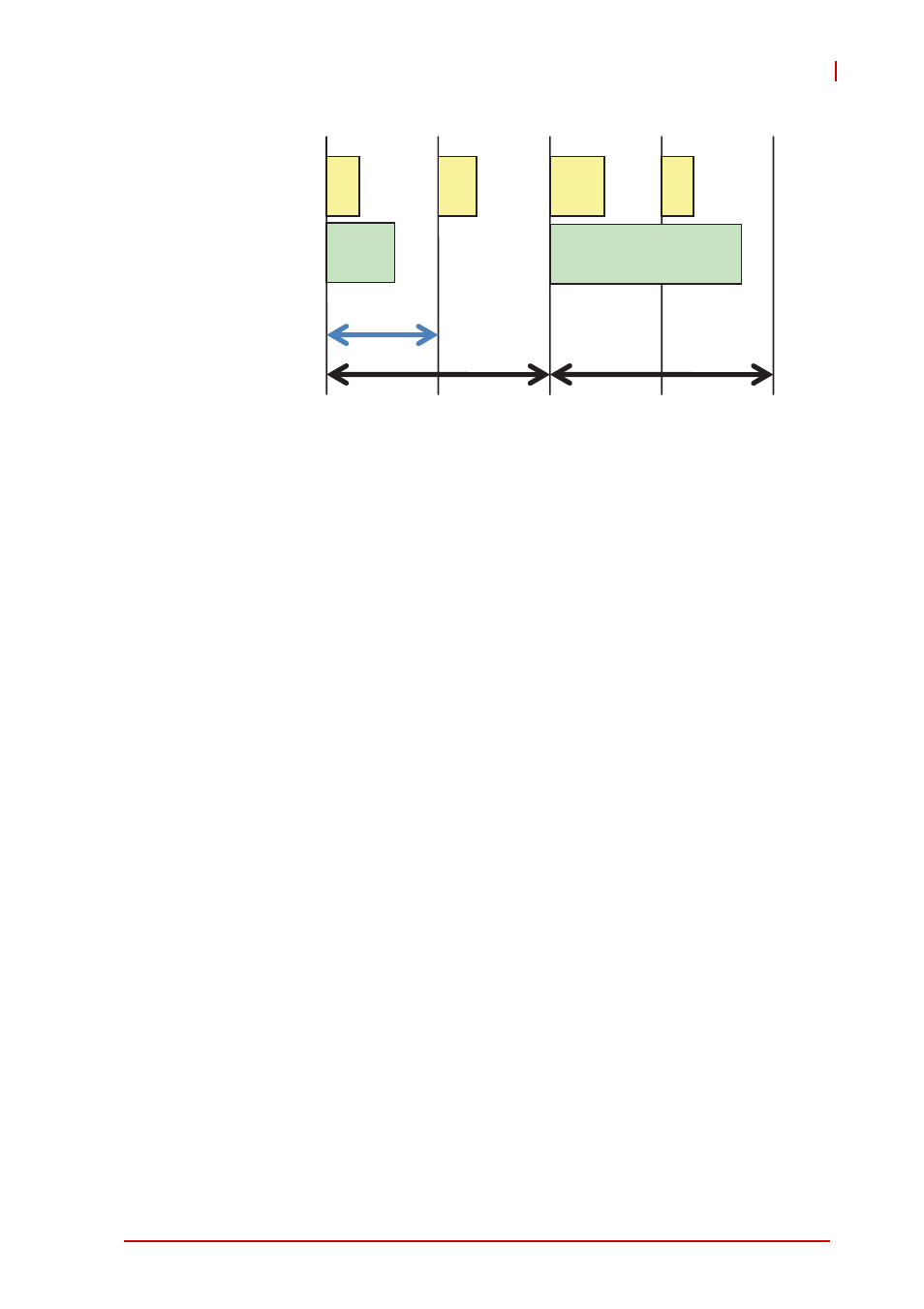
Figure 4-2: Control cycle
The motion program is executed in motion control cycle to control
jobs to be executed in each motion control cycle directly for more
precise completion of realtime jobs. Please pay attention to DSP
loading when doing this.
Loading of CPU in controller is hard to predict as the controller is
affected by many factors, e.g. external signals, user operations, and
algorithm process during its operations. In most cases, please try to
keep CPU utilization rate to below 70% and reserve 30% of CPU
capacity to the processing of system jobs and momentary work loads.
Overloading (work loads exceed control cycle) may lead to
unpredictable results. This controller provides you with some
functions and tools to monitor processor utilization rate and adjust
control procedures. In case of any processor overloading, the
controller logs and warns (interrupt, plase refer to section of interrupt)
that you may take for proper responses in your program.
How to use API:
get_motion_control_timing ()
// get usage amount of current motion
control cycle
get_max_ motion_control_timing
()// get maximum usage amount
of motion control cycle
get_motion_control_timing ()
// get usage amount of current host
control cycle
get_motion_control_timing ()
// get maximum usage amount of host
control cycle
reset_max_motion_control_timing()
reset_max_host_control_timing()
get_over_cycle_event()
get_over_cycle_count()
reset_over_cycle_count ()
Movement control
Elapsed time
System work
Elapsed time
Movement control
duration
System work duration
Time