Figure 4-38, Velocity blending (method 4), Figure 4-39 – ADLINK AMP-208C User Manual
Page 133: Velocity blending (method 5)
Motion Control Theory
119
AMP-204C / AMP-208C
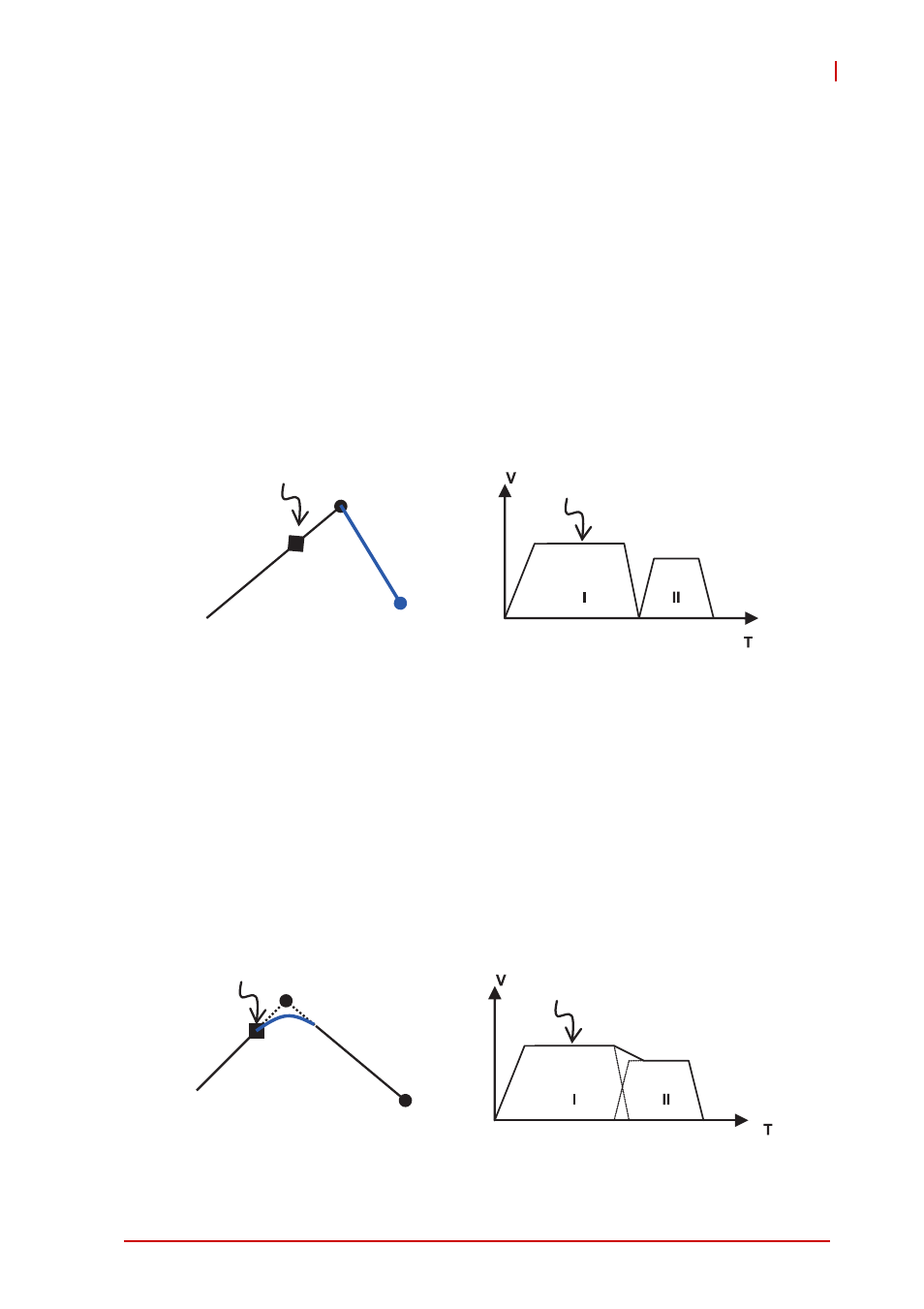
4. Buffered
When new interpolation command is received it is saved in
motion buffer first. Commands in queue then continues to
execute after the original interpolation command is finished.
Take figure below. When exectuing a straight line interpolation
command from S1 to E1, a "buffered" interpolation command is
given during movement in progress. The controller then saves
interpolation command in queue and move from E1 to E2 after
interpolation command is completed. The speed profile follows
user settings exactly. To ensure no slow down or minor
slowdown between two interpolation commands you may set
up ending speed of previous interpolation command and
starting speed of next interpolation command properly.
Figure 4-38: Velocity blending (method 4)
5. Blending when deceleration start
When new interpolation command is received it is saved in
motion buffer first. When original interpolation command starts
slowing down the new interpolation command also starts for
blending as shown in figure below. You may determine
blending time by adjusting deceleration rate. The higher the
deceleration rate is the smaller the blending region will be and
the smaller deviation form original interpolation command path
will be.
Figure 4-39: Velocity blending (method 5)
Buffered
Buffered
E1
S1
E2
Start deceleration
Blending
E1
S1
E2