Kenco Engineering SmartSonic Transmitter (Remote) User Manual
Page 18
Page 18
NOTES: Whenever the tank height is required, you should enter the distance from the face of the sensor to the bottom of
the tank. In order to obtain accurate measurement results it is most recommended to perform this operation
when the tank is empty. For flow measurement, enter the precise flume height.
If the entered tank height value is less than a value previously entered for the
4 mA, 20 mA or Relay functions,
the value for that function will automatically revert to the default value.
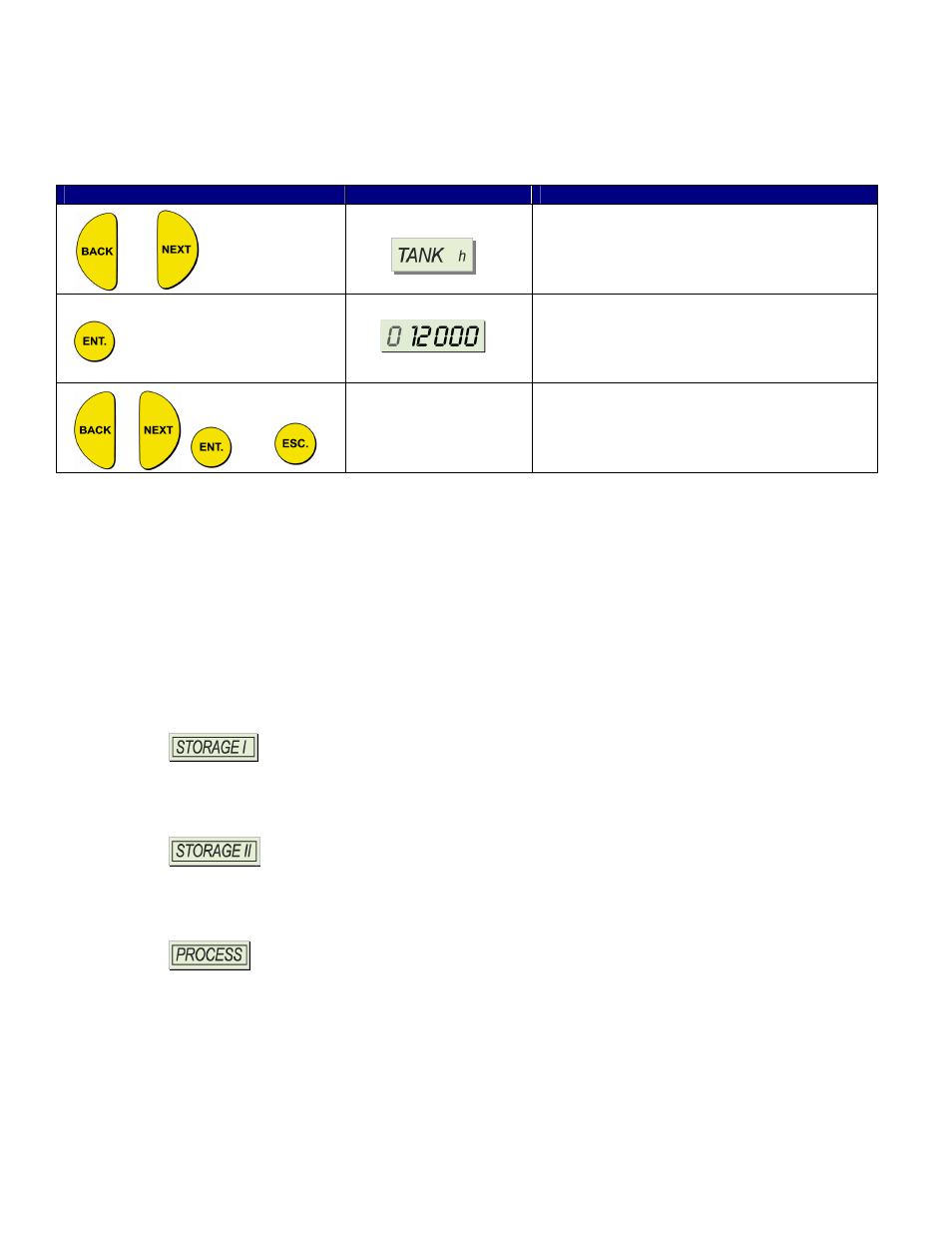
Press / Action
Display
Description
or
Move to TANK h (flashing).
Displays the default value, or the previously
entered value.
and
Used to select the desired value. Press ENT
when finished.
Setting the Application Type
This displays the application function of the transmitter. Either Liquid (Level / Distance mode) or Flow (Flow Mode).
Setting the Operation Mode
The Operation Mode function enables you to set SmartSonic Remote to compensate for environmental conditions that
affect the measurement readings.
For liquid applications, each mode determines the reaction time required for SmartSonic Remote to recalibrate when there
is a change in the environmental conditions. Depending on the specific requirements for your application, you can select a
mode that provides faster readings but with less precision (by performing a smaller number of calculations per cycle), or
slower readings with a greater degree of accuracy (by performing a larger number of calculations per cycle).
Three modes are available for SmartSonic Remote. Each mode is recommended for use as follows:
F
:
Recommended in the following conditions:
v
Level/Distance Change: 0 – 0.65 ft/sec
v
Wavy surfaces
v
Slow filling/emptying rate
v
Applications where the sensor is installed near the tank wall
: (Twice as fast as STORAGE I): Recommended in the following conditions:
v
Level/Distance Change: 0 – 1.3 ft/sec
v
Wavy surfaces
v
Slow filling/emptying rate
v
Applications where the sensor is installed near the tank wall
F
:
This mode is suitable for applications where a fast reading is more important than
precision. A reading will be displayed within a short time, even if the signal processing
procedure was not completed.
F
Recommended in the following conditions:
v
Level/Distance Rate Change: 0 – 3.3 ft/sec
v
Foamy top surface
v
Presence of agitation
v
Presence of vapor
v
Applications requiring very fast readings