8 scale the armature current feedback - jumper j18, 9 inspect jumper j26 – Rockwell Automation WebPak 3000 DC Drives Hardware Reference, Installation and Troubleshooting User Manual
Page 37
Drive Setup and Adjustment
3-5
The expected analog tachometer voltage range can be set to a maximum of 250 or 62 VDC.
J11 selects the hardware circuitry to maximize the resolution over the entire speed range.
Jumper J14
Jumper J11
Gear In Speed Tach Volts < 16 volts
LOW
16
Gear In Speed Tach Volts < 31 volts
LOW
31/125
Gear In Speed Tach Volts < 62 volts
LOW
62/250
Gear In Speed Tach Volts < 125 volts
HIGH
31/125
Gear In Speed Tach Volts < 250 volts
HIGH
62/250
Note that the output voltage of the tachometer must not exceed 250 VDC when the motor is
rotating at GEAR IN SPEED. To calculate the output voltage, multiply the two parameter
values:
Tach Voltage at GEAR IN SPEED = GEAR IN SPEED x ANALOG TACH VOLTS
1000
1000
3.4.7
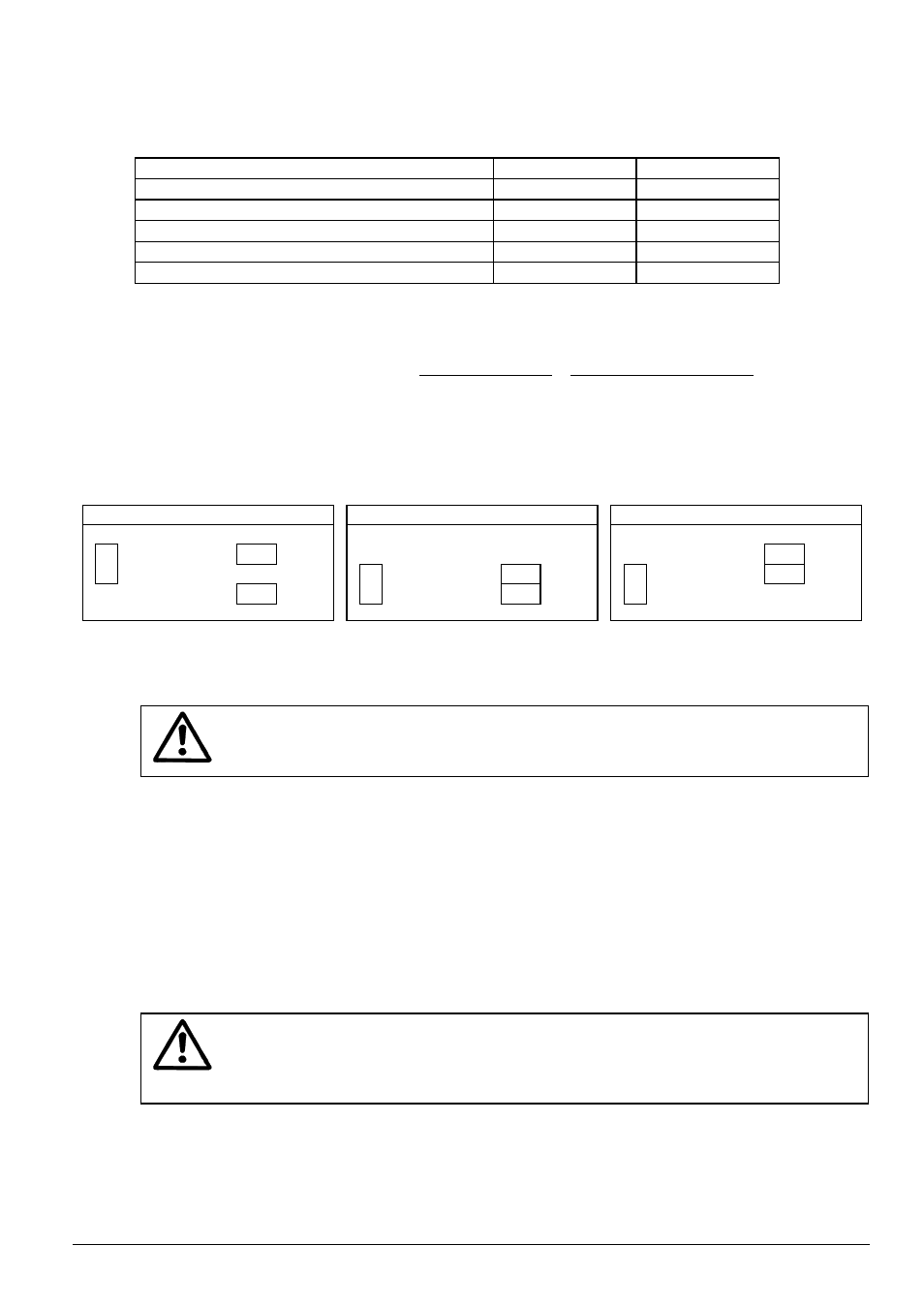
Set the Line Speed Reference - Jumpers J12 and J10
The AUTO REF Jumpers J12 and J10 select the type of Line Speed reference. J12 selects the
type of signal - VOLTS (Voltage) or MAMPS (milli-amps). J10 selects the range.
+ / - 10 VOLTS MAX
4 - 20 mA
10 - 50 mA
J12
J10
J12
J10
J12
J10
!
VOLTS
10 - 50
!
!
VOLTS
!
VOLTS
10 - 50
!
!
VOLTS
!
VOLTS
10 - 50
!
!
VOLTS
!
(BOTH)
!
!
4 - 20
!
(BOTH)
!
!
4 - 20
!
(BOTH)
!
!
4 - 20
!
MAMPS
PARK
!
!
!
MAMPS
PARK
!
!
!
MAMPS
PARK
!
!
Figure 3.2 - AUTO REF Jumpers (J12 and J10)
3.4.8
Scale the Armature Current Feedback - Jumper J18
ATTENTION: The drive will not run at the correct speed if this jumper is not set to
the correct position. Failure to observe this precaution could result in damage to, or
destruction of, the equipment.
The ARM I FB RB Jumper J18 scales the armature current feedback signal. The drive
calculates the value of the burden resistor needed to scale the armature current feedback
signal. The calculations are based on the values of MOTOR RATED ARM AMPS (P.008) and
MAXIMUM CURRENT (P.007).
The OIM displays the correct position of this jumper during the Quick Start procedure.
Verify this setting before performing the Self-Tuning procedure.
3.4.9
Inspect Jumper J26
This jumper determines whether or not a fault is generated when a tacho loss occurs or the
armature is open.
ATTENTION: Jumper J26 is for factory personnel use only. The user must not
change the status of this jumper. Misapplication of this jumper can cause the motor
to run at dangerously high speeds. Failure to observe this precaution could result in
bodily injury or loss of life.
J26 is intended for use by Rockwell Automation factory personnel only. Verify that it is set as
listed in table 3.1.