About the logix5550 ladder logic program – Rockwell Automation 1336-GM1 Remote I/O Communications Module User Manual
Page 51
Creating Ladder Logic Programs
4–13
About the Logix5550 Ladder Logic Program
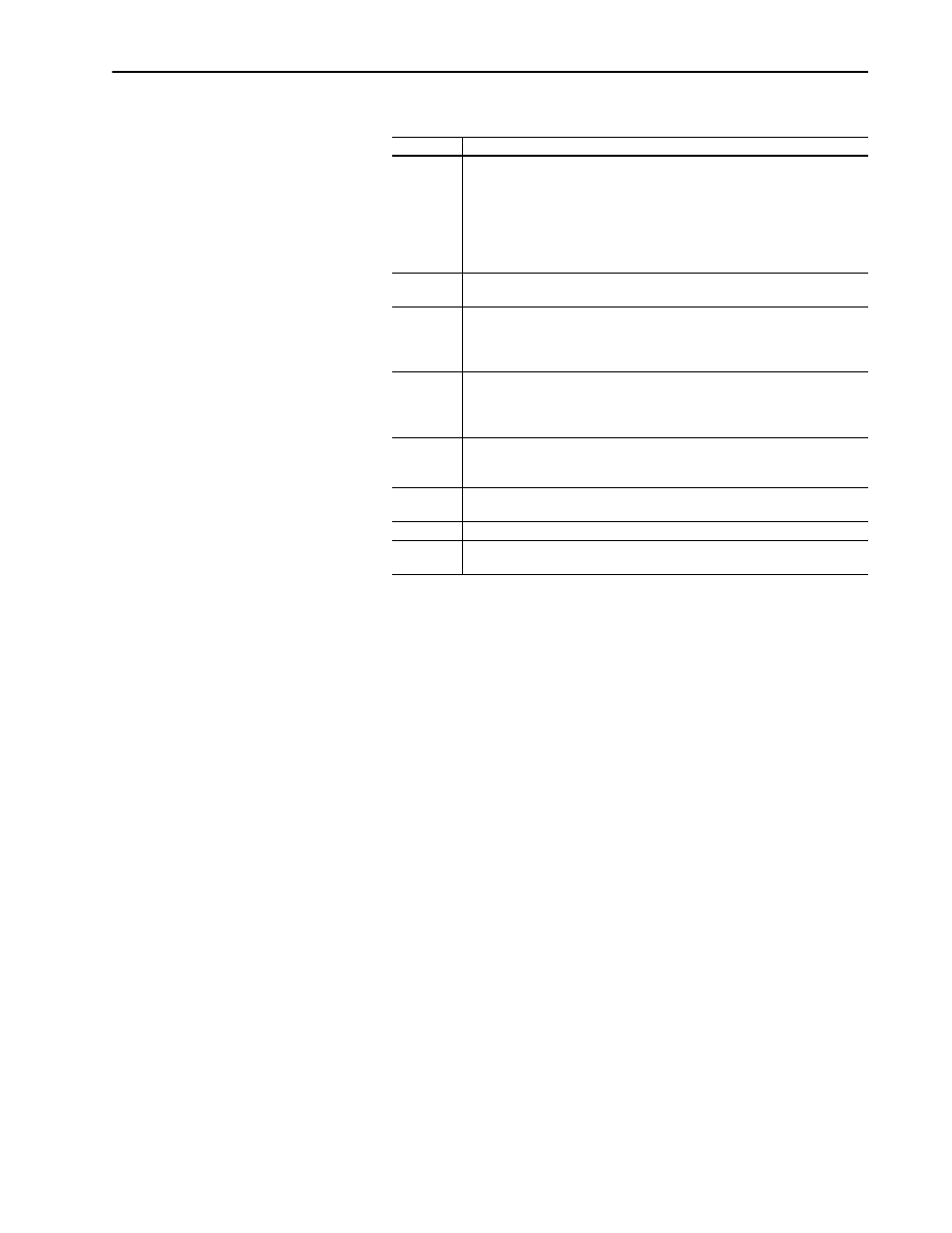
Rung
Description
0001
When the machine Start push button is pressed, the Logix5550 sends a START
command to the drive. The drive will start if no STOP command is being sent
by the Logix5550 or any other control device. (Start button is a normally open
contact in this example.) SCANport products will start only if the start bit
transitions high while the stop bit is already low.
In the example, we use rack 02 and starting group module word 0. The tags are
configured to represent this address.
0002
When the machine Stop push button is pressed, the Logix5550 sends a STOP
command to the drive. (Stop button is normally closed contact in this example)
0003
A frequency command is transferred from the Logix5550 data table to the drive.
A range of 0 to 32767 is equivalent to zero to maximum frequency. (In this
example, the drive frequency select parameters are set to receive a frequency
reference from the Remote I/O module.)
0004
When the machine Jog button is pressed, the Logix5550 will send a JOG
command to the drive. The drive will start and run at the programmed jog
frequency if no STOP command is being sent by the Logix5550 or other control
device. (Jog button is normally open contact in this example.)
0005
When the machine Clear Faults push button is pressed, the Logix5550 sends a
CLEAR FAULTS command to the drive. (Clear Faults button is a momentary
normally open contact in this example.)
0006
When the drive is running, the Logix5550 will receive a Drive Running status
bit.
0007
When the drive is faulted, the Logix5550 will receive a Drive Faulted status bit.
0008
A value is moved from the Logix5550 data table into the drive parameter
specified by the Data In A1 parameter in the drive.