14 limitations and restrictions, Programming – Lenze PM94P01C User Manual
Page 59
PM94P01C
57
Programming
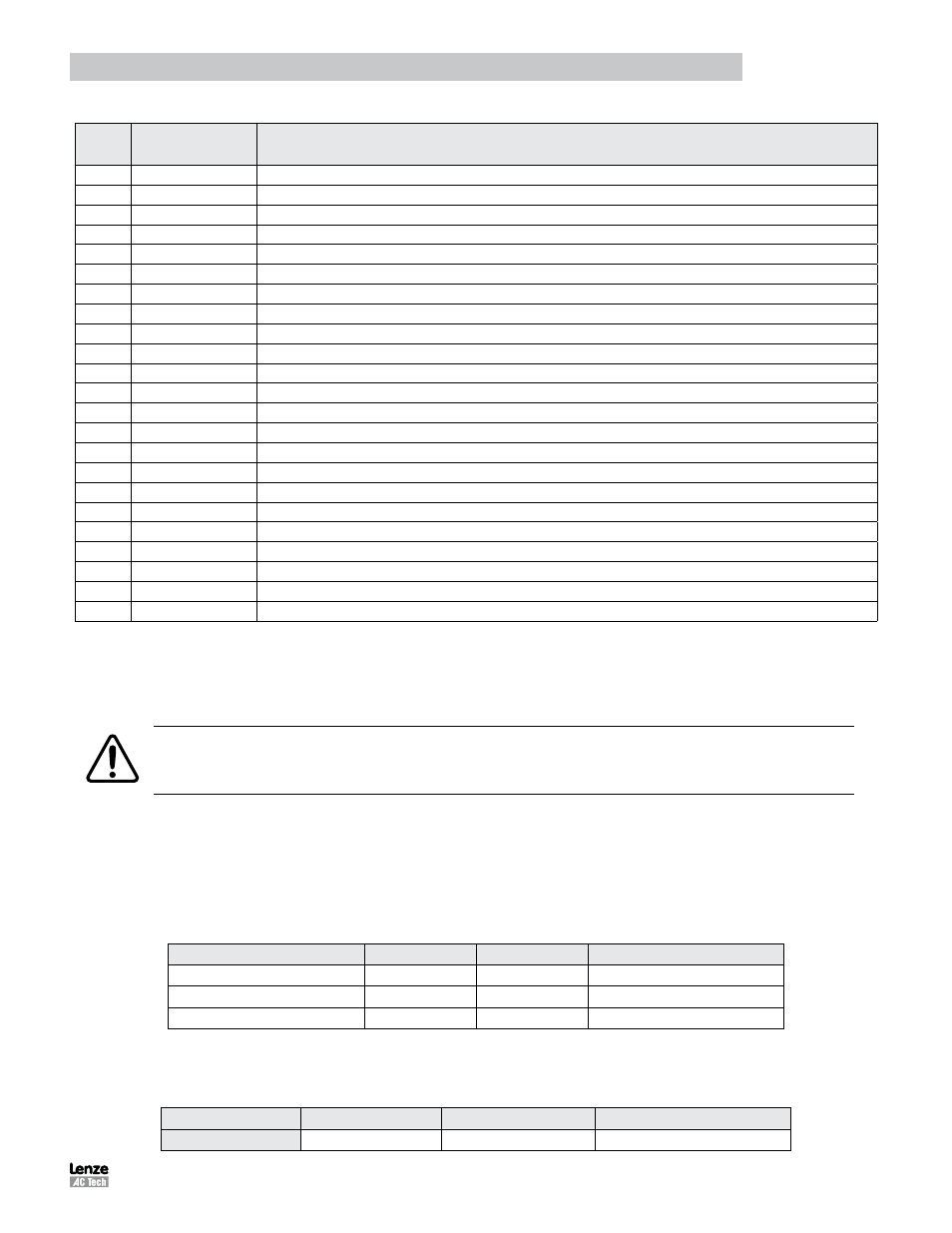
Fault
ID
Associated flags
in status register
Description
20
3
Subroutine stack overflow. Exceeded 16 levels subroutines stack depth.
21
3
Subroutine stack underflow. Executing RETURN statement without preceding call to subroutine.
22
3
Variable evaluation stack overflow. Expression too complicated for compiler to process.
23
21
Motion Queue overflow. 32 levels depth exceeded
24
21
Motion Queue underflow. Last queued MDV statement has non 0 target velocity
25
3
Unknown opcode. Byte code interpreter error
26
3
Unknown byte code. Byte code interpreter error
27
21
Drive disabled. Attempt to execute motion while drive is disabled.
28
16, 21
Accel too high. Motion statement parameters calculate an Accel value above the system capability.
29
16, 21
Accel too low. Motion statement parameters calculate an Accel value below the system capability.
30
16, 21
Velocity too high. Motion statement parameters calculate a velocity above the system capability.
31
16, 21
Velocity too low. Motion statement parameters calculate a velocity below the system capability.
32
3,21
Positive limit switch engaged
33
3,21
Negative limit switch engaged
34
3,21
Attempt at positive motion with engaged positive limit switch
35
3,21
Attempt at negative motion with engaged negative limit switch
36
3
Hardware disable (enable input not active when attempting to enable drive from program or interface)
37
3
Undervoltage
38
3
EPM loss
39
3,21
Positive soft limit reached
40
3,21
Negative soft limit reached
41
3
Attempt to use variable with unknown ID from user program
45
1,3
Secondary encoder position error excess
2.14 Limitations and Restrictions
Communication Interfaces Usage Restrictions
Simultaneous connection to the RS485 port is allowed for retransmitting (conversion) between interfaces.
WARNING!
Usage of the RS485 simultaneously with Ethernet may lead to unpredictable behavior since the drive
will attempt to perform commands from both interfaces concurrently.
Motion Parameters Limitation
Due to a finite precision in the calculations there are some restrictions for acceleration/deceleration and max velocity
for a move. If you receive arithmetic faults during your programs execution, it is likely due to these limitations. Min/Max
values are expressed in counts or counts/sample, where the sample is a position loop sample interval (512msec).
Table 20: Motion Parameter Limits
Parameter
MIN
MAX
Units
Accel / Decel
65/(2^32)
512
counts/sample^2
MaxV (maximum velocity)
0
2048
counts/sample
Max move distance
0
+/- 2^31
counts
Stacks and Queues Depth Limitations
Table 21: Stack Depth Limit
Stack/Queue
Motion Queue
Subroutines Stack
Number of Events
Depth
32
32
32