3 incremental (moved) motion, 4 absolute (movep) move, Programming – Lenze PM94P01C User Manual
Page 51
PM94P01C
49
Programming
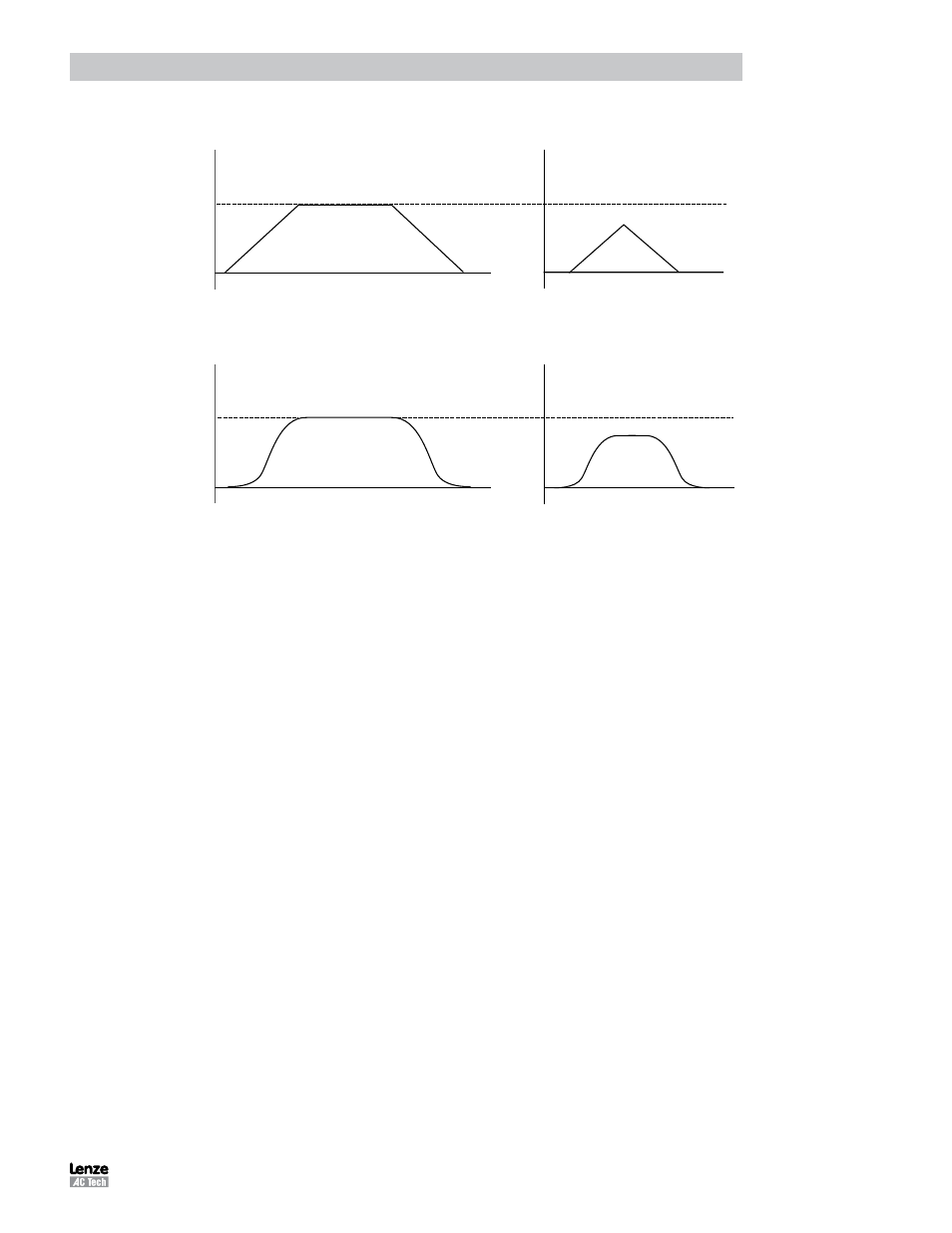
Velocity
Trapezoidal moves
Velocity
Velocity
Velocity
Velocity = 20
Velocity = 20
max velocity < 20
max velocity < 20
Time
Time
Time
Time
Move2 - 1.5 units
Move1- 4 units
Move4 - 1.5 units
Move3- 4 units
MOVE 1
MOVE 2
MOVE 3
MOVE 4
S-curve moves
Figure 19: Move Illustration
ACCEL = 200
DECEL = 200
MAXV = 20
MOVED 4
;Move 1
MOVED 1.5
;Move 2
MOVED 4 , S
;Move 3
MOVED 1.5 , S
;Move 4
All four of the moves shown in Figure 19 have the same Acceleration, Deceleration and Max Velocity values. Moves 1
and 3 have a larger value for the move distance than Moves 2 and 4. In Moves 1 and 3 the distance is long enough to
allow the motor to accelerate to the profiled max velocity and maintain that velocity before decelerating down to a stop.
In Moves 2 and 4 the distance is so small that while the motor is accelerating towards the profiled Max Velocity it has to
decelerate to a stop before it can ever obtain the profiled Max Velocity.
2.11.3 Incremental (MOVED) Motion
Incremental motion is defined as a move of some distance from the current position. ‘Move four revolutions from the
current position’ is an example of an incremental move.
MOVED is the statement used to create incremental moves. The simplified syntax is:
MOVED <+/-distance>
+/- sign will tell the motor shaft what direction to move.
2.11.4 Absolute (MOVEP) Move
Absolute motion is defined as a motion to some fixed position from the current position. The fixed position is defined
as a position relative to a fixed zero point. The zero point for a system is normally established during the homing cycle,
typically performed immediately after power-up.
During a homing cycle, the motor will make incremental moves while checking for a physical input, index mark, or
both.