1 drive operating modes, 2 point to point moves, Introduction – Lenze PM94P01C User Manual
Page 28: Figure 9: reference arrangement diagram
PM94P01C
26
Introduction
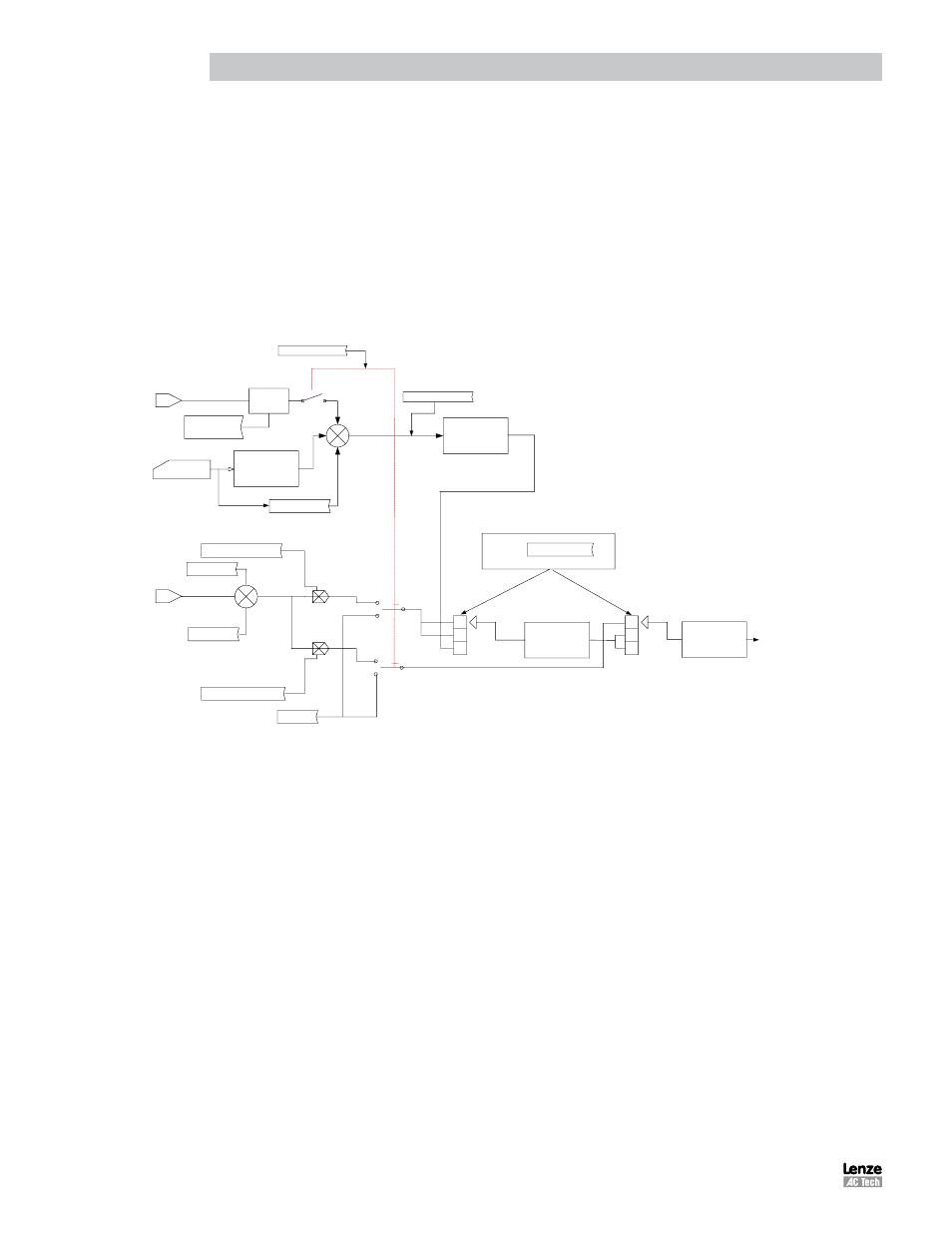
1.10.1 Drive Operating Modes
There are three modes of operation for the PositionServo: Torque, Velocity and Position. Torque and Velocity modes
are generally used when the command reference is from an external device, (Ain). Position mode is used when the
command comes from the drives User Program, or from an external device, encoder or a step and direction pulse.
Setting the drive’s mode is done from the [
Parameter] folder in MotionView. To command motion from the user program
the drive must be configured to internal reference mode. When the drive is in position mode, it can be placed into a
velocity mode without the need to change operating mode to ‘Velocity’. Velocity profiling from Positioning mode can
be turned on and off from the User Program. Executing the VELOCITY ON statement is used to activate this mode
while VELOCITY OFF will deactivate this mode. This mode is used for special case indexing moves. Velocity mode is
the mode when the target position is constantly advanced with a rate set in the VEL system variable. The Reference
arrangements for the different modes of operation are illustrated in Figure 9.
MA/MB inputs
#37, Reference
"INTERNAL"
#214,#189 TPOS
Gearing
#79,#80
Master to System
ratio
User's program
Trajectory
Generator
Phase Correction
POSITION
REGULATOR
0 Torque
1 Velocity
2 Position
#35,VELOCITY SCALE
#89
Dead Band
Analog input #1
#90, Offset
#34, DRIVEMODE
VELOCITY
REGULATOR
CURRENT
REGULATOR
1
2
3
TO MODULAT
1
2
3
#36,CURRENT SCALE
IREF
"INTERNAL"
"INTERNAL"
+
+
+
Figure 9: Reference Arrangement Diagram
1.10.2 Point To Point Moves
The PositionServo supports two types of moves: absolute and incremental. The statement MOVEP (Move to Position)
is used to make an absolute move. When executing an absolute move, the motor is instructed to move to a known
position. The move to this known position is always referenced from the motor’s “home” or “zero” location. For example,
the statement (MOVEP 0) will cause the motor to move to its zero or home position, regardless of where the motor is
located at the beginning of the move. The statement MOVED (Move Distance) makes incremental, (or relative), moves
from its current position. For example, MOVED 10, will cause the motor to move forward 10 user units from it current
location.
MOVEP and MOVED statements generate what is called a trapezoidal point to point motion profile. A trapezoidal
move is when the motor accelerates, using the current acceleration setting, (ACCEL), to a default top speed, (MAXV),
it then maintains that speed for a period of time before decelerating to the end position using the deceleration setting,
(DECEL). If the distance to be moved is fairly small, a triangular move profile will be used. A triangular move is a move
that starts to accelerate toward the Max Velocity setting but has to decelerate before ever achieving the max velocity in
order to reach the desired end point.